




アプリケーション / ソリューション

モータ設計
JMAGはモータの解析に絶対の自信をもっています。長年に渡るモータ分野で培われたノウハウが使いやすい形で提供されています。

ロボティクス
バッテリー駆動がメインとなるヒューマノイドでは、小型・軽量でありながら、高出力、高精度な制御、高い耐久性を持つモータが求められます。

AIがもたらすデータ駆動型設計の未来
AIの進化により、「人間がツールを操作する」時代から、「AIエージェントがJMAGを操作し自律的に設計を行う」時代へと移行します。AIとの相乗効果により、JMAGはデータ駆動型設計の実現を飛躍的に加速します。

磁気デバイス
磁性体の非線形性、渦電流による表皮効果に加え、浮遊容量を含めたインピーダンス特性などを正確に捉え、ワンランク上の磁気デバイス設計を実現します。

超電導
超電導機器は、高い磁束密度での磁気評価だけでなく大電流が流れ温度上昇することによる熱評価、大きなローレンツ力による強度評価など、マルチフィジックスを考慮した特性評価が必要です。
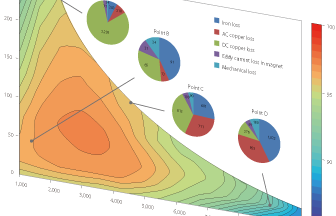
モータのモデルベース開発事例
モータ設計で高い実績を持つJMAGがモデルベース開発のための新しいワークフローを提案します。
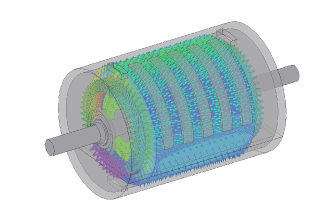
JMAGが提案するモータ設計のための熱解析
磁気設計段階において精度と使いやすさのバランスが取れた熱設計手法が求められています。
JMAGは磁界解析と熱解析のモデルで設計変数を共有化することで磁気特性・熱特性の評価を同時に行います。
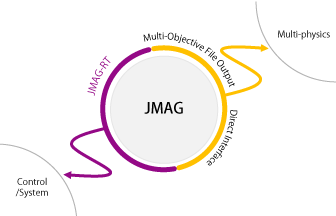
JMAGオープンインタフェースプログラム
連携解析の必要性や、多目的ファイル入出力ツールについてのご紹介を含め、よりご利用しやすいページへとリニューアルしました。ユーザによる導入事例や、お申し込み方法などもこちらよりご覧いただけます。