JMAG-RT
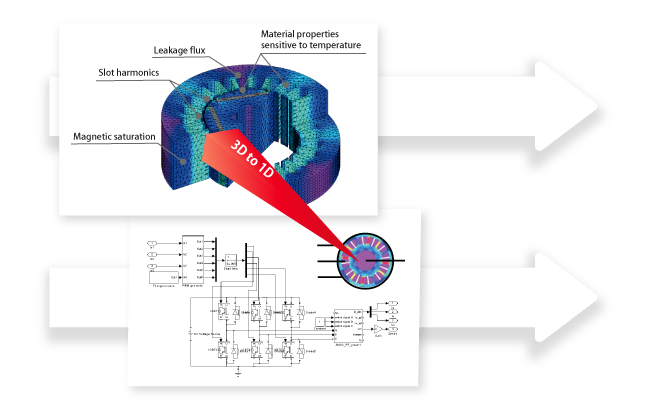
JMAG-RT enables model based development with high concurrency, allowing plant design and control design to be performed concurrently. JMAG-RT is a system which generates high-fidelity plant models (JMAG-RT models) in a system level simulation from FEA models. From system design, to ECU verification using HILS, JMAG-RT has a wide range of uses.
Features
- Using a virtual device model in HILS means that it is possible to test the ECU while the device is still under construction. This can reduce the amount of test time necessary on the actual test bench.
- Conceal information about geometries or materials so it can be shared between business companies.
Furthermore, password protection can be enabled, allowing for secure transactions. - The JMAG-RT model captures device performance that includes non-linear effects, saturation, and space harmonics. This high fidelity model’s response is nearly identical to the actual device’s response.
- Support for FEM-Parameterized PMSM Block output expands the use of JMAG-RT in Simscape.
JMAG-RT Viewer higher than Type 2 is required for output.
JMAG-RT Viewer
Information accounted for in JMAG-RT
- The motor models used in system simulation utilize the conventional simple model (dq model) that generally disregards motor details. However, traditional dq models cannot describe modern-day high-performance motors.
- Although, FEA accurately simulates motor behavior unlike dq models, it requires a great deal of analysis time.
- JMAG-RT delivers a rapid system simulation accounting for motor characteristics "like finite element method".
- Also, the level of detail can be increased by measuring actual machines, but doing so will reduce the value as Model Based Development. Being able to evaluate prior to obtaining an actual machine is highly significant from the perspective of simulation.
Above is a graph depicting inductance characteristics possessed by the JMAG-RT model. The inductance characteristics have current amplitude, current phase and mechanical angle dependency.
Current amplitude will change depending on the state of the motor load and as a result, the inductance value of both the current phase and mechanical angle will also change.
JMAG-RT is capable of simulating spatial and temporal inductance and torque variations.
JMAG Function Videos
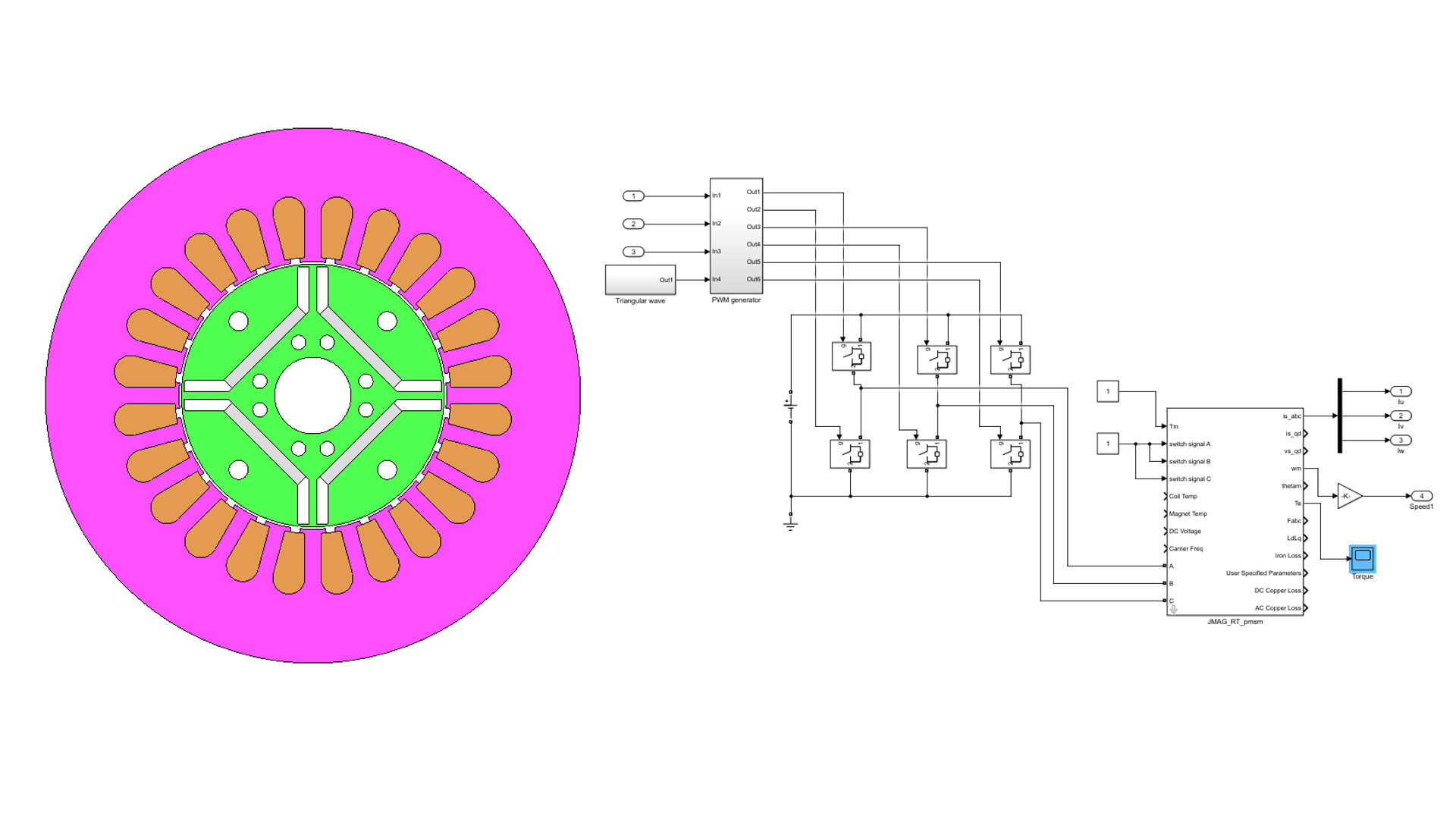 Control Circuit Simulations Using JMAG-RT
Control Circuit Simulations Using JMAG-RT High-accuracy control simulation of motors using Simscape
High-accuracy control simulation of motors using Simscape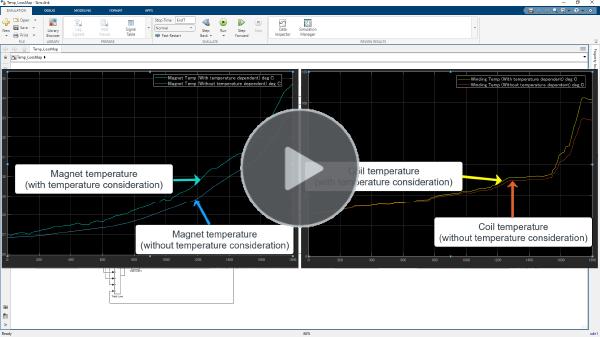 Evaluation of parts temperature in drive cycle of a traction motor
Evaluation of parts temperature in drive cycle of a traction motorSupported Devices
| Machine type | Sample model |
|---|---|
| Permanent magnet synchronous motors (3-phase, 6-phase) | IPM, SPM |
| Induction motors (3-phase, 6-phase) | IM |
| Stepping motor (2-phase) | PMSTEP |
| Switched reluctance motors (3-5 phase) | SRM |
| Linear solenoid | SOLENOID |
| Permanent magnet linear motors (3-phase) | LSM |
| Wound-Field Synchronous Motor | WFSM |
| Synchronous reluctance motor (3-phase, 6-phase) | SynRM |
| Generic model |
JMAG Function Videos
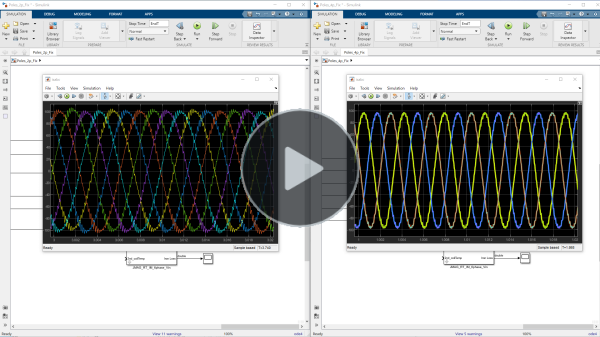 Control simulation of 6-phase induction motors using JMAG-RT
Control simulation of 6-phase induction motors using JMAG-RTHow to Obtain JMAG-RT Models
RTT files are generated by JMAG-RT library manager during design simulation by JMAG.
RTT files are available from motor makers.
- JMAG-Express Online (Motor design tool, Free)[1]
- Download from JMAG-RT model library
- Presenting actual measured values of a motor in tables [1]
How to Check JMAG-RT Motor Models
- The detail of generated JMAG-RT model can be confirmed.
- Induced voltage, mechanical angle-torque characteristics, advanced phase-torque characteristics
Can be confirmed in JMAG-RT library manager. - Inductance map, velocity-torque characteristics, efficiency map
JMAG-RT Viewer displays motor specifications that the JMAG-RT model holds (number of poles, rated power etc.) as well as inductance map, velocity-torque characteristics, and efficiency.
 RTT file of induction motors and N-T curve
RTT file of induction motors and N-T curve
 Efficiency Map at 20 deg
Efficiency Map at 20 deg
 Efficiency Map at 60 deg
Efficiency Map at 60 deg
JMAG-RT Supported System
SILS, MILS: System Level Simulator
| Company Name | Product | Country |
|---|---|---|
| ESI ITI GmbH | SimulationX | Germany |
| Gamma Technologies | GT-SUITE | USA |
| MapleSoft | MapleSim | Canada |
| The MathWorks, Inc. | MATLAB/Simulink | USA |
| National Instruments | LabVIEW/VeriStand | USA |
| Powersim Inc. | PSIM | USA |
| Siemens Industry Software S.A.S. | LMS Imagine.Lab Amesim | Belgium |
| Synopsys, Inc. | SaberRD | USA |
| FunctionBay, Inc. | RecurDyn | Korea |
| POWERSYS/ AESIM.tech | SIMBA | USA |
| Smart Energy Laboratory Co.,Ltd. | Scideam | Japan |
HILS: Real Time Simulator
| Company Name | Product | Country |
|---|---|---|
| A&D COMPANY, LIMITED | HELIOS | Japan |
| Concurrent Real-Time Inc. | - | USA |
| DENSO TEN Limited. | CRAMAS | Japan |
| dSPACE GmbH | ASM | Germany |
| DSP Technology Co.,Ltd | RTSim | Japan |
| OPAL-RT Technologies Inc. | RT-LAB | Canada |
| Speedgoat GmbH | - | SWITZERLAND |
| Typhoon HIL | - | USA |
*For more information about each company, see the Product Partners page.
*Product and service names mentioned or referenced in this paper are trademarks or registered trademarks of their respective owners.

