DP
2次元及び軸対称過渡応答磁界解析
-
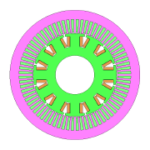
[RTML-060] IM 連続定格 100(kW)
型式:IM 出力:100(kW) ステータ外径:200(mm) 積厚:65(mm) 電源:DC500(V)/600(A) ロータ:かご形
-
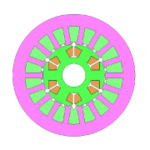
[RTML-052] WFSM_04
型式:WFSM 出力:10(kW) ステータ外径:185(mm) 積厚:40(mm) 電源:DC240(V)/84.8(A)、DC300(V)/50(A) ロータ:WF 相数:3
-
[RTML-053] WFSM_05
型式:WFSM 出力:10(kW) ステータ外径:185(mm) 積厚:50(mm) 電源:DC240(V)/84.8(A)、DC300(V)/35(A) ロータ:WF 相数:3
-
[RTML-054] WFSM_06
型式:WFSM 出力:75(kW) ステータ外径:212(mm) 積厚:200(mm) 電源:DC600(V)/250(A)、DC200(V)/20(A) ロータ:WF 相数:3
-

[RTML-055] WFSM_07
型式:WFSM 出力:75(kW) ステータ外径:212(mm) 積厚:200(mm) 電源:DC600(V)/250(A)、DC600(V)/45(A) ロータ:WF 相数:3
-
[RTML-056] WFSM_08
型式:WFSM 出力:75(kW) ステータ外径:400(mm) 積厚:65(mm) 電源:DC500(V)/283(A)、DC600(V)/50(A) ロータ:WF 相数:3
-

[JAC273] 交流損失を考慮したIPMモータの効率マップ作成
ここでは、PWMによる交流損失を考慮したIPMモータの効率マップを作成し、交流損失を考慮しない場合の効率マップと比較しています。
-
[RTML-051] WFSM_03
型式:WFSM 出力:10(kW) ステータ外径:115(mm) 積厚:150(mm) 電源:DC240(V)/84.8(A)、DC300(V)/15(A) ロータ:WF 相数:3
-
[JAC253] 誘導発電機の出力特性解析
ここでは、誘導発電機の出力電力と効率の関係を示した事例を紹介します。
-

[JFT015] JMAGとSTAR-CCM+による熱流体を考慮した直接連成解析の手順(Ver.22.0以降)
本資料では、JMAGとSTAR-CCM+による熱流体を考慮した双方向連携解析の設定手順を学習します。
-
[JFT132] パラメータとトポロジーの同時最適化
ここでは、パラメータとトポロジーを同時に最適化する方法を学習します。
-

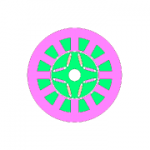
[JAC288] シンクロナスリラクタンスモータのトポロジー最適化
ここでは、トポロジー最適化を用いてトルクリップルを最小化、平均トルクを最大化するロータ形状を探索する事例を紹介します。
-
[JFT167] JMAG-RTモデルの等価回路への任意回路の追加
本資料では、MATLAB/SimulinkでJMAG-RTモデルを動作させる際に任意の回路を追加する方法を学習します。
-
[JAC239] IPMモータの故障解析
ここでは、JMAG-RTを使用しIPMモータの故障をシミュレーションした事例を示します。シミュレーションしているのはIGBTの故障に起因する開回路故障であり、これはPMSMの駆動において最も一般的…
-
[JAC162] 制御シミュレータとJMAG-RTを用いたSRモータの駆動シミュレーション
ここでは、SRモータのトルクやインダクタンス特性をJMAG-RTを用いて求めた後、JMAG-RTモデルとして回路/制御シミュレータへ取り込んで、SRモータに電圧を印加して駆動し、トルク脈動を解析しま…
-
[JFT011] 制御シミュレーション時のティース電磁力のモニタリング
本資料では、JMAG-RTモデル作成時に電磁力や磁束密度など、任意のモデル内部情報を出力するための事前準備、MATLAB/Simulinkの設定、得られる電磁力について説明します。

