モータ設計講座
JMAG Newsletterの読者にはモータ設計に関する興味をお持ちの方が多くいらっしゃることもあり、今号より、モータ設計講座を連載する事となりました。といっても、我々は解析屋でモータ設計の専門家ではありませんので、講座というのも恐れ多い限りですが、我々が七転八倒してモータ設計を学ぶ姿をお伝えすることが、皆さまのモータ設計に少しでもお役に立てればと考え、連載をスタートさせようと思い至りました。
何故、JMAGがモータ設計講座をやることになったのか
JMAGは汎用磁界解析ソフトウェアで、解析対象は広く、電気機器などの電磁現象一般を扱う事が出来ます。しかし、モータの研究開発にJMAGをお使いのお客様が多いことはご存知の方も多いと思います。そのため、解析機能開発もモータの解析を精度良く、便利に行う為のものが多く実装されています。
昔はモータの設計を行う技術者はほんの一握りにすぎず、磁界解析をモータ設計に活用する技術者は更に少なかったのが実情です。そのため、シミュレーションソフトウェアには使いやすさはあまり期待されていませんでした。経験豊富な専任の技術者がソフトウェアの使いにくさは何とか解決してしまっていたからです。
最近は様々な機器にモータが使用されるようになり、モータを設計したり、選定したりする技術者が増えています。それに伴い、ソフトウェアにも使いやすさが期待されるようになってきています。日常のJMAGのテクニカルサポートや、お客様を往訪していろいろお話しを伺うことで貴重な情報を得ることは出来ますが、機密などの関係でその情報や要求は断片的で、その背景となる全体像を把握出来ない状況に、我々は歯痒く思うことも少なくありませんでした。そのため、ソフトウェアを作り、サービスを提供する立場の我々はどの様なソフトウェアを開発し、どの様な情報を提供すれば、ユーザーに貢献できるのかを知るために、自分達もモータの設計について学び、ユーザーがどの様にJMAGを設計に使用しているのかを知るべきであるという考えに思い至りました。例えば楽器を作っている職人さんであれば、演奏家のように上手に奏でることは出来なくても、多少は演奏する事が出来れば、全く演奏できない職人さんに比べ、楽器がどう使われるのかが解るため良い楽器を作る事が出来るのと同じ話です。まあ長々と書くような話ではありませんし、今更言う話かと思われた方もいらっしゃると思いますが、このような経緯でモータの設計について学ぼうと考えました。
また、JMAGのテクニカルサポートを行っているなかでJMAGの使い方ではなく、モータの設計や評価についてのご質問を受ける事も増えています。典型的な例として、「電圧駆動で解析するとトルクが常に負になってしまいます。バグですか?」というようなご質問を受ける事がありました。結局、JMAGのバグでは無く、設定回転数が高いため、電源電圧以上の誘起電圧を発生して常に負の電流が流れてしまう当たり前の現象だったというオチなのですが、そこに気づかずに悩んでしまう方も少なからずいらっしゃいます。そのような方に安心してJMAGを使って頂くためには、モータ設計についての情報を提供すべきではないかと思い、モータの設計について学んだ事をモータ設計講座として展開しようという動機となりました。
教科書プロジェクト
この考えに基づいて、JMAGでは数年前から「これからモータ設計をする方のための設計体験セミナー」を実施しています。このセミナーは4~5名の小規模なセミナーで、モータ設計をこれから行う初心者や興味をもっている方を対象にしています。設計対象はブラシレスDCモータで、要件に従ってモータの体格や主要寸法を割り出し、性能を概算するまでの一連の流れをレクチャーするもので、参加者が多いセミナーです。しかし、半日のセミナーで全てをお伝えすることは難しい面があることと、集合形式のセミナーでは参加が難しい方も多くいらっしゃることも考え、教科書や参考書のようなきちんとした形にまとめて提供すべきだろうと思うようになりました。
まずは、我々のようなモータ設計初心者が学べるような、平易な教科書が無いかと色々探してみたのですが、日本国内では見つける事が出来ませんでした。これは、ブラシレスDCモータ自体が比較的新しい技術分野であるためなのかもしれません(JMAGがブラシレスDCモータの分野で多く使われている事と関係があるかもしれません)。
したがって、我々がモータ設計についてこれから学ぶ事を教科書の形にまとめ、JMAG-ExpressやJMAG-Designerの使い方と関連づけることで、JMAGユーザーやJMAG潜在ユーザーに貢献していこうと考えました(一応、営利企業ですので純粋なボランティアを行う事はありません)。
現在の構想では、教科書をJMAG-Expressの副読本として位置づけ、JMAG-Express上で設計パラメータを色々と変更しながら実験することで、モータの設計の基礎を学べる形にしたいと考えています。そのプロトタイプとしてJMAG-Expressを使ったモータ設計の動画を下記Webサイトで公開しておりますので、興味のある方は是非ご覧下さい。
https://www.jmag-international.com/jp/express/
また、教科書リリースの暁には、皆様からのフィードバックを頂き、教科書自体をブラッシュアップしていきたいと考えていますので、是非とも皆様にもご協力いただきたいと考えています。
 図1 JMAG-internationalのトップページ
図1 JMAG-internationalのトップページ
JMAGのWebトップから、JMAG-Expressのページにジャンプインできますので、気軽にご覧になれます。
 図2 Web動画スタート画面
図2 Web動画スタート画面
Webページのスライドショーでは、JMAG-Expressを使用してモータの設計検討を行う様子を再現しています。初期段階では、サイジング機能を使い大まかな体格を決めてしまえるので、多種多様な設計案を試せるところがJMAG-Expressの大きなメリットとなります。
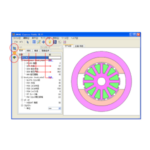
 図3 パラメータ入力の様子
図3 パラメータ入力の様子
JMAG-Expressの画面の下には変更したパラメータとその意味についての解説を記述しています。また、検討工程が右にリストアップされていますので、試行錯誤の過程等も俯瞰することが出来ます。
 図4 解析結果とその分析
図4 解析結果とその分析
JMAG-Expressで行った解析結果を理解し、どの様な判断を下すべきかの例も下欄で解説しています。
次回から設計講座をスタート
連載第1回目は決意表明でした。第2回からは実際の教科書の内容に沿って、設計講座をスタートさせていきますので、ご期待ください。
並行して、WEBでの情報公開やセミナー実施なども計画しておりますので、こちらもご期待頂ければと考えております。
(坂下 善行)
コラム 集中巻と分布巻
モータ設計講座はモータ設計の流れの中での個別の判断に焦点を当てて解説しようと考えています。そこで、このコラムではモータ設計において気になる話題について取りあげ、JMAGを使って簡単な検証する事で、解き明かしてみようと考えています。
今回は集中巻と分布巻について取り上げてみたいと思います。集中巻の一般的な特徴としては、一極のティースにコイルを直接巻くので、分布巻のように複数のティースに渡ってコイルを巻く必要が無い事が挙げられます。その結果、コイルエンドの高さを低める事ができるので、モータの銅損を低減すると共にモータ自体の軸方向長さを詰めることができます。製造工程においても、分布巻に比べて工程や冶具を減らせるメリットもあります。一方、極あたりのステータの歯数が最小限しか無いために磁路が不均一になる事が欠点です。このため、磁石磁束の利用率が低く、鎖交磁束の高調波成分を多く含んでしまい、トルク変動を生じやすい事や、鉄損が大きくなり易いデメリットを持っています。
したがって、外径に対して軸方向の寸法に制約があり、コイルエンドの高さを抑えたい場合や、比較的トルクの大きな領域で運転し、銅損の低減が優先される機器でのモータで、集中巻が有効であると言えます。
(参考資料;埋込磁石動機モータの設計と制御;武田洋次他共著;オーム社)
まずは、集中巻と分布巻で磁界解析を行ないました。解析モデルのロータ形状と積厚は同一とし、駆動条件も同じにしています。異なるのはステータ形状とコイルの抵抗だけです(図1)。
図1 モータ形状 集中巻(左)と分布巻(右)
最初に無負荷誘起電圧を比較しましたが、波形が大きく異なっている事がわかります(図2)。集中巻は基本波の振幅は分布巻とほぼ同じですが、スロット数が少ない分、高次成分の比率が異なる為に、波形の違いに現れています(図3)。
図2 無負荷誘起電圧波形 集中巻(左)と分布巻(右)
図3 無負荷誘起電圧波形の周波数成分 集中巻(左)と分布巻(右)
負荷運転時の解析結果を見ると、電流進角に対する感度に違いが表れています。前述の通り、集中巻は磁路が不均一となるため、弱め界磁制御によるリラクタンストルクが得にくくなっています(図4)。
図4 電流位相-トルク特性 集中巻(左)と分布巻(右)
それぞれのdq軸インダクタンスは下記で、
集中巻;Ld=1.900(mH)/ Lq=2.163(mH)
分布巻;Ld=1.412(mH)/ Lq=2.057(mH)
dq軸インダクタンス値からも、集中巻ではリラクタンストルクが期待しにくいことが解ります。
今回、解析して結果の中で特徴的だったのは、磁石の渦電流損です。集中巻は分布巻に比べて反磁界の変化が大きいため、磁石に生じる渦電流が大きくなっています(図5)。分布巻の磁石に生じる発熱が2.6(W)に対し、集中巻の磁石に生じる発熱は23.4(W)に達しました。
図5 磁石の渦電流損失 集中巻(左)と分布巻(右)
磁石損自体はモータ全体の効率として見ると大勢に影響はありませんが、モータに使用されている材料で一番温度による影響を受けやすい磁石自身が発熱するわけですので、実際の設計時には熱減磁による性能低下や不可逆減磁への注意が必要になります。
また、鉄損に関しても、分布巻に比べて集中巻のロータ鉄損の方が大きくなるという結果が得られました(図6)。鉄損の値は下記です。
集中巻;ステータ64.4(W)/ロータ21.6(W)
分布巻;ステータ76.5(W)/ロータ8.1(W)
※9000(rpm)/70(Apeak)
図6 鉄損分布コンター 集中巻(左)と分布巻(右)
集中巻の方が鉄損の面からも、ロータの温度が上がりやすい傾向がある事が解りますので、集中巻を採用する際は、ロータの発熱量について十分注意する必要があると言えます。
[JMAG Newsletter 2013年9月号より]