JMAG-Expressによるモータ設計
2013年7月にリリース致しましたJMAG-Express Publicの最新版では、DCブラシモータの計算機能が追加されました。本稿では、今回追加されたDCブラシモータ解析機能を例にして、JMAG-Express Publicの特徴的な機能を活用したモータ設計事例をご紹介します。
JMAG-Express Publicとは
JMAG-Express Publicとは、我々JSOLがモータ設計者向けに提供している無償のモータ設計ツールです。設計パラメータとして形状寸法、材料、巻線および駆動条件をテンプレートに従って入力するだけで、モータ特性が瞬時に計算できます。JMAG-Express Publicは、概念設計や初期設計段階で、大まかなレイアウトを決めるのに大変便利なツールです(図1)。
これまでに対応していたモータは、ブラシレスモータ、誘導電動機、スイッチトリラクタンスモータでしたが、今回新たにDCブラシモータに対応しました。
 図1 JMAG-Express Publicメイン画面
図1 JMAG-Express Publicメイン画面
モータの設計パラメータは、それぞれ形状、材料、巻線、駆動条件のタブで設定、変更を行うことができます。特性評価は評価ボタンをクリックすることで瞬時に行えます。加えて、画面左側にはサイジング(体格の自動決定)、感度解析(設計パラメータの影響度分析)を行うことも可能です。
JMAG-Express Publicによるモータ設計
今回新たに対応致しましたDCブラシモータの解析機能を例にJMAG-Express Publicによるモータの概念設計の方法を紹介します。JMAG-Express Publicを利用したモータの設計フローを示します(図2)。
 図2 JMAG-Express Publicを利用した設計フロー
図2 JMAG-Express Publicを利用した設計フロー
サイジング機能により初期設計案を決定し、特性評価、感度解析により影響度の高いパラメータを分析します。引き続き、設計変更、特性評価というプロセスを繰り返しながら設計を進めます。
モータ体格を瞬時に決定
従来のモータ設計では、モータの体格は要求仕様の出力から、モータのロータ直径D(m)と積厚L(m)を決めていたかと思います。さらに、エアギャップ部に生じる推力密度、ロータ直径、積厚からトルクを見積もっていました。この場合、経験等から推力密度を求める必要があります、直径と積厚とのバランスも検討する必要があるため、大変手間がかかりました。ここで紹介する、JMAG-Express Publicを使用しますと、モータ体格を自動的に決定することができます。JMAG-Express Publicにはサイジングという機能があり、モータの目標定格出力等の要求仕様を設定するのみで、お奨めの形状を提案します。最初にベースの形状タイプを選択するだけで面倒な計算も必要ありませんし、作成時間も瞬時です。
それではJMAG-Express Publicのサイジング機能を用いてモータ体格を決めてみます。まず、形状を決定します。ロータとステータの組み合わせは自由に選択、変更できます(図3)。
形状タイプが決まれば、要求仕様を入力するだけで、JMAG-Express Publicがモータ形状を提案します(図4)。
 図3 モータ形状タイプの選択
図3 モータ形状タイプの選択
モータ形状の定義方法として、既存のモータテンプレートを利用する以外にも、ロータ、ステータそれぞれに対して様々な形状タイプを組み合わせて作成することが可能です。
 図4 サイジング機能(左:入力画面、右:結果)
図4 サイジング機能(左:入力画面、右:結果)
メインウィンドウのサイジングボタンを押すと入力画面が開きます。ここで、目標定格出力(W)を定義し、必要に応じて最大モータ外径(直径)(mm)と最大モータ積厚(mm)を制約条件として指定することで、体格を算出します。
瞬時にモータ特性が確認可能
JMAG-Express Publicは設計パラメータを入力するだけで、モータ特性が瞬時に計算できます。DCブラシモータの場合、誘起電圧定数、トルク定数、電流vsトルク特性、回転数vsトルク特性、鉄損/銅損特性等のモータ特性が得られます。
瞬時にモータ特性が確認できるため、詳細な要求仕様を満たすための調整も簡単に行えます。例えば、回転数10,000RPMで出力50W以上という要求は満たしているが、起動トルクが要求の250mNmに足りていない場合を考えます。また、モータ形状から起動電流は30Aまでしか投入できないとします。
起動トルクを上げるために、コイル巻数を増やすことを検討します。ただし、ステータスロットに対して巻ける本数には制限がありますし、巻数を増やすことで最大回転数は下がってしまいます。JMAG-Express Publicには、素線径等のワイヤ情報を入力することでスロット内の占積率も確認できますので、回転数vsトルク特性の結果を見ながら適切なコイル巻数を簡単に決定することができます(図5)。今回は巻数の初期設定6Turnでは、占積率が26.2%でまだ余裕がありましたので、8Turnにあげて起動トルクを上げます。8Turnに増やすことで、要求を満たすモータが設計できました(図6)。
 図5 巻線パラメータの設定画面
図5 巻線パラメータの設定画面
メインウィンドウの巻線タブから巻線パラメータの設定を行うことができる。今回は6Turnでの占積率が26.2%で余裕があったため、8Turnに変更し起動トルクの向上を狙います。
 図6 トルクvs電流振幅
図6 トルクvs電流振幅
電流vsトルク特性を比較します。同じ起動電流に対し8Turnの場合は要求を満足する起動トルクが得られました。
設計変更方針もナビゲート
要求仕様を満たしていない場合、どの設計パラメータを変更すればいいのかを決定することは簡単な作業ではありません。どの設計パラメータを変更すべきかの判断に迷った場合には、JMAG-Express Publicの感度解析機能が便利です。この機能は目的のモータ特性を指定するだけで、どの設計パラメータが指定した目的に対して感度(影響度)が高いかを示してくれます。
例えば、鉄損の低減を図る目的で、鉄損に対する各パラメータの感度を調べる場合を考えます。今回のモータでは10,000RPMで出力50Wとなる運転点での損失は銅損と鉄損が同程度となっています。次に鉄損を下げるために検討すべき設計パラメータ毎の感度を調査します。JMAG-Express Publicの感度解析は”感度を調査したい目的関数となる物理量”と”調査したい運転点”を指定するだけで感度が計算できます。今回は目的関数に鉄損を指定し、10,000RPMで出力50Wとなるトルク50mNmを運転点として設定します(図7)。
巻数や定格電圧はモータ要件で決まっており変更できないとし、ここでは感度が二番目に高かったティース幅を変更して鉄損を下げることを試みます。鉄損は磁束の時間変化量の大きさによって決まりますので、磁気飽和が問題となるティース幅の感度が高くなっています。ティース幅を広くすることで磁束密度が下がり、鉄損を下げることができます(図8)。もちろん、ティース幅を広げるとコイルスペースが小さくなりコイルの占積率を圧迫しますが、JMAG-Express Publicではコイルの占積率を簡単に確認できることは既に示しました(図5)。
 図7 感度解析の設定と感度
図7 感度解析の設定と感度
メインウィンドウの感度解析ボタンで感度を確認出来ます。ここでは、鉄損に対する各パラメータに対する感度を示しています。巻数、ティース幅の感度が高いことが分かります。
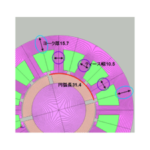
 図8 ティース幅の変更
図8 ティース幅の変更
鉄損を低減するため、感度解析で分析した結果にしたがって、ティース幅を広くします。寸法変更はメインウィンドウの形状タブで簡単に設定することができます。
JMAG-Express Publicの入手方法
JMAG-Express PublicのライセンスはWebページから簡単に入手する事ができます。入手方法は以下の通りです。
- ダウンロード
JMAG-Express PublicのWEBページにアクセスして、JMAG-Express Publicをダウンロード。 - ライセンスキーの取得
同じくJMAG-Express Publicのページからライセンスキーの申し込み。 - インストールとライセンスキーの設定
JMAG-Express Publicをインストールし、送られてきたライセンスキーを入力。
最後に
JMAG-Express Publicは、今回のDCブラシモータ対応のように、今後も機能の改良、拡張をおこないます。JMAG-Express Publicは無償ですので、是非とも一度お使い下さい。
(服部 哲弥)
[JMAG Newsletter 2013年9月号より]