Overview
Quietness and safety are required from a motor as equipment such as electric vehicles and robots that utilize motors have been in great demand. For this reason, motor control is required to utilize the information that has not been used, such as controlling the waveform of the magnetic flux in a form of the sine wave. In motor designing, a measure such as limiting the change of excitation force, when controlling the motor, to below the threshold value is required as well. In order to achieve this goal, it is effective to observe the inside of the motor during the control.
“JMAG-RT model,” which is a motor plant model, was able to output physical quantities such as current and inductance used in the motor equation, but it is now possible to output user-defined physical quantities. Physical quantity output can be monitored in real-time when running the control simulation and may be used for purposes such as using the physical quantities as control information and when studying the control method for suppressing vibrations as well as designing the magnetic circuit.
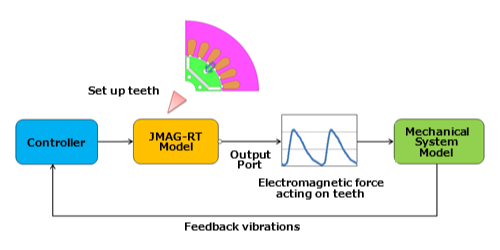
Fig. 1 Example of electromagnetic force output
User-defined physical quantities will be output from the "Output Port" of the JMAG-RT model in the Control Simulator. For example, by the input of electromagnetic force output into the mechanical model, it is possible to calculate vibration and feedback into the control system, etc.
You need to sign in as a Regular JMAG Software User (paid user) or JMAG WEB MEMBER (free membership).
By registering as a JMAG WEB MEMBER, you can browse technical materials and other member-only contents for free.
If you are not registered, click the “Create an Account” button.
Create an Account Sign in


