Nobuo Morimura, Yu Takano
Powertrain Design Department, Engineering Division,
SUBARU CORPORATION
Abstract
Up until now, the performances of the developed control software were evaluated by performing tests on the actual machine. However, controlling the environmental conditions of the test can be very costly. Moreover, parameter tuning of highly nonlinear control systems, such as inverter overmodulation or torque control using voltage phase adjustment, incurs even more man-hours. On top of that, it is expected that the trend of increasing speed and torque will also contribute to the increase of man-hours.
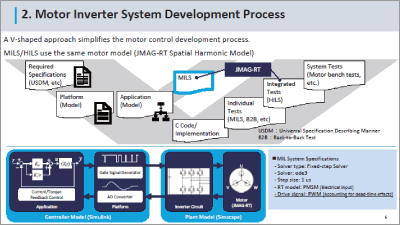
To reduce the man-hours required for the performance evaluations and control design, our model-based development includes control development software that feature automatic code generation tools, as well as a JMAG-RT model that faithfully and accurately simulate the motor behavior.
In this paper, we confirm the validity of our model by comparing it to the experimental data and then conclude on the usefulness of the model-based development for control design. Moreover, as the computational cost of model-based development is becoming an increasingly important matter in the field, we introduce some examples of computation time reduction.

You need to sign in as a Regular JMAG Software User (paid user) or JMAG WEB MEMBER (free membership).
By registering as a JMAG WEB MEMBER, you can browse technical materials and other member-only contents for free.
If you are not registered, click the “Create an Account” button.
Create an Account Sign in



