モータ設計にFEAは有効か?
本稿ではモータを設計・利用されている方を対象に、シミュレーションを活用する効果を知って頂くことを目的としています。よりよいモータ設計のためにご参考頂ければ幸いです。
はじめに
コンピュータのハードウェア、ソフトウェアの進歩に伴い、モータ設計分野で有限要素法電磁界解析(以下FEA)が活用され、実際に開発現場で成果が上がるようになっています。
一方、FEAを利用されていない方にお話を伺うと、"FEAが良いということは聞いているが、従来の設計手法で設計できているので必要性を感じない"、"導入や検討に手間も時間もかかりそう"と仰る方が多いと感じています。
本シリーズではこれらの疑問に応え"なぜ、モータ設計にFEAが有効なのか?"を解説しています。より良いモータ設計を行って頂くためにFEAを活用することが効果的であることをご理解いただきたいと考えています。
第1回ではモータ設計の概念設計、初期設計段階におけるFEAの活用について述べました。第2回では詳細設計段階におけるFEAの活用について紹介します。概念設計、初期設計で大まかに決定した設計案に基づき、各部の寸法や条件、材料特性などの設計パラメータを最適化し、詳細設計案を固めるのがこの段階の目的となります。詳細設計段階における、設計最適化へのFEMの効果的な活用や、FEAの結果を分析して設計への知見とする方法について紹介します。
PMモータの高性能化と課題
モータに限りませんが、詳細設計で性能を作りこむ際の難しさを整理すると以下になります。
(1)トレードオフをバランスさせ最適値を求める
モータの性能を向上させるために解決すべき課題は多岐に渡ります。効率を向上させるために損失を低減したり、振動源とならないようにトルク変動を低減することを求められていますが、これらの開発課題はトレードオフの関係にあることも多く、一方を重視すると他方が妨げられてしまい、適切なバランスを実現することは容易ではありません(図1)。例えば、出力密度を高めるために磁石の使用量を増やすと、コストの低減の妨げになるなどです。設計者が複雑に絡み合ったトレードオフ関係から最適値を選び出すためには、各課題解決の効果の関係を定量的に認識する必要があり、そのためには物理が織り込まれるFEAは必須といえます。
 図1 モータの高性能化と開発課題
図1 モータの高性能化と開発課題
(2)限界まで追い込む
元々モータという機器は他のエネルギー変換器に比べて効率は悪くありません。その効率を更に高めることが求められているわけですので、損失を減らしていくためには重箱の隅を突いて改善する作業が要求されます。まさにミクロな実験検証を行うことが必要となりますので、FEAの独壇場となります。
(3)離れ業を繰り出す必要性も…
従来の設計の延長線上で課題が解決できるのであれば、ベテランの設計者ならFEAを使わなくとも、過去の経験に基づいた磁気回路法などの設計手法から設計案を導くことは可能でしょう。しかし、トレードオフを最適化し、限界まで追い込むことを求められる要求を満たすためには、過去の経験の延長から一段ジャンプアップする設計を行う必要も出てきます。このような場合、過去の経験だけで戦うのは難しいと思われますが、FEAであれば、試作機を準備することが憚られる奇抜なアイディアをも試すことが可能です。
詳細設計で性能を作り込む
このように、FEAでは形状を精密にモデル化し、材料の非線形磁化特性も正確にモデル化しますので、モータ内部で起こっている複雑な電磁気現象を再現することが可能です。設計者のアイディアを机上で具体化し、机上で評価し、よりよい設計案に練り上げていくことが可能となります。以下に具体例を挙げて、FEAの効果についてご説明いたします。
コギングトルクの低減
例えば、高品質のモータに対する要求として、コギングトルクを小さくすることが期待される場合があります。コギングトルクはモータの細部形状に対する感度が極めて高く、材料特性の影響も受けるため、設計が難しいテーマといえます。
対策として、ステータやロータにスキューを施すことでコギングトルクを低減できることは知られていますが、生産性が落ちる、トルク定数が低下する、スラスト方向の力が発生する、等々のデメリットもあるため、設計者にはスキューを施すことなく、磁気回路を最適形状に整えることで低コギングトルクを実現することが期待されています。一口に磁気回路を最適化するといっても設計パラメータは複数あります。コギングトルクの主たる要因はコイルスロットにより固定子の磁気抵抗が断続的に変化するためですので、磁石の極弧角とスロットピッチを適切に設計することによりコギングトルクを低減できます。SPMモータの磁石の幅を設計パラメータとして極弧角を変化させた場合を検討します(図2、3)。この検討では、磁石幅を14mmから11mmに変化させた場合に12.5mmで最小になり、初期値14mmに対して約半分になります。しかし、それ以上幅を狭めるとコギングトルクは増加し始め、11mmでは初期状態よりも大幅に増加する様子が分かります。
 図2 SPMモータ形状
図2 SPMモータ形状
 図3 磁石幅のよるコギングトルクの違い
図3 磁石幅のよるコギングトルクの違い
実機では、磁石の角部にRを掛けることで、磁石の欠けを防いだり表面処理を剥がれにくくする効果を高めます。磁気回路的にも境界部の切り替えが緩やかになるため、コギングトルク低減の効果が期待できます。このモデルでは磁石の角Rを0.25Rから1.5Rまで変化させた場合の検討を行い、1.0Rで最小になること分かりました(図4、図5)。
 図4 磁石角R形状の違い
図4 磁石角R形状の違い
 図5 磁石角Rによるコギングトルクの違い
図5 磁石角Rによるコギングトルクの違い
このようにコギングトルクの低減を検討する場面で、FEMは力を発揮します。ここでは、コギングトルクの低減のみに注目しましたが、実機では誘起電圧波形やトルク定数についても並行して評価しながら形状を決めていくことになります。なお、コギングトルクの解析はFEAでも難易度の高い解析ですので、メッシュの対称性に注意するなどモデル化に十分に注意して行う必要があります。
ロータの磁気回路の最適設計
モータの小型化軽量化の要件から、材料の性能を最適に使い、磁気回路を効率良く構成する設計が期待されています。材料の磁気飽和に対して余裕のある設計をすれば、鉄損の増大や非線形性による制御性の低下を防ぐことができますが、モータが大型化してしまいます。逆に余裕を削りすぎると、磁気飽和によりトルク定数が低下したり、損失の増大や特性の歪みによる制御性の悪化に繋がります。このように、無駄無く無理の無い磁気回路を設計するためには磁気飽和の度合いを正確に把握しながら設計することになります。磁気回路法でもある程度の評価は可能ですが、やはり限界設計を行う為にはFEAが必須となります。特にIPMモータのロータ磁石周辺の磁気回路は非常にデリケートで、トルク定数、損失、トルク変動に大きく影響します。
2012年度のJMAGユーザー会の基調講演で千葉工業大学山崎先生が御講演された事例の中で、IPMモータの最適化設計を行った結果が紹介されています(※残念ながら、山崎先生自ら開発されたFEAを使用された検討結果ですが)。ロータのエアギャップ付近に適切なスリットを設けることで、性能の向上を実現したという報告ですが、このような施策は実質的なエアギャップ長が増えて磁気抵抗が大きくなるため、常識的にはモータ性能向上には寄与しないと考えてしまいがちですが、実際にはロータ内の磁束の流れが整理されることにより、高次成分が抑制される事で鉄損が低下するため、総合的にはモータの出力性能や効率が向上すると示されています。今後、このような磁気回路内の磁束の流れを適切に制御する考え方は、広く取り入れられてくると思いますが、FEAを使用するからこそ実現するアイディアであるといえます。
千葉工業大学 山崎克巳氏「回転機の損失と形状最適化」 JMAGユーザー会2012 発表資料より引用
磁石形状の適正設計
希土類磁石モータに使われている希土類磁石が高価であることは今更言うまでもありません。したがって、設計者は最小限の使用量で最大限の効果を得たいと考えていると思います。また、磁石は非常にデリケートな材料で、特に温度上昇によって特性が大きく低下するため、熱減磁させないように使用温度範囲などにも十分注意する必要があります。また、モータの出力範囲を広げるために弱め界磁制御が用いられますが、まさに磁石の界磁を弱めるため、減磁の危険性を孕んでいます。一度不可逆減磁させてしまうと磁石の性能を元に戻すことが難しいため、減磁させない様に温度雰囲気や過負荷時の耐性についても見込んでおく必要があります。
IPMモータの磁石幅を変更した場合にモータ特性がどの様に変化するかの事例を御紹介します。磁石厚みを2.5mmから4mmまで増やした場合における、無負荷誘起電圧とトルク、磁石の平均磁束密度について注目しました(図6)。磁石の厚みを2.5mmから4mmまで増やすことで容積は60%増加しますが、誘起電圧は8.3%の増加に留まります。一方、トルクは15.4%増加しており、磁石を厚くすることで電機子反作用による反磁界に抗うことができるため、トルクが増加する様子が確認できます。更に、磁石全体の平均磁束密度は0.52(T)から0.65(T)と、23.8%増加します(図7)。この結果、磁石の動作パーミアンスが上昇するため、熱や反磁界による減磁のリスクが低減するといえます。逆に言えば、磁石減らしてもトルクはそれほど低下しませんが、減磁のリスクが大きく増していくことが分かります。
 図6 磁石厚みの検討を行ったモータモデル
図6 磁石厚みの検討を行ったモータモデル
 図7 磁石厚みによる特性への影響
図7 磁石厚みによる特性への影響
ネオジ系焼結磁石は電気伝導率が比較的高いため、スロット高調波やキャリア高調波により生じる渦電流が発熱源となり、磁石の温度を上げてしまうリスクも良く知られています。この回避策としては、積層コアと同じ考え方で、磁石を分割して間に絶縁材を挟むことで、渦電流を減らす工法が採られます。しかし、分割数を増やすと磁石の製造コストが増加し、磁化性能は低下するため、適切な分割数に設計する必要があります。ロータ形状やステータ形状による高調波成分も強く影響しますので、分割数を決めるためには様々な要素を勘案する必要があります。磁石の分割数と渦電流の低減具合を示します(図8、図9)。
 図8 磁石の渦電流損失の検討を行ったモータモデル
図8 磁石の渦電流損失の検討を行ったモータモデル
 図9 磁石分割による渦電流損失分布の低減
図9 磁石分割による渦電流損失分布の低減
回転強度の確保
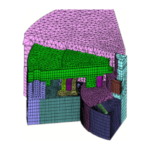
モータの高出力化を実現するため、高回転化が必須となっています。機械強度面から見ると、希土類焼結磁石は硬くて脆い性質なため、高速回転による遠心力が局所的に加わると破壊してしまう危険性があります。SPMモータを10000(r/min)で廻した際、遠心力に依って磁石に生じる応力集中の様子を示します(図10、11)。このモデルは磁石の角部をコアが支える構造を採っているため、局所的に500(MPa)程度の応力が発生しています。希土類磁石の圧縮応力は1000(MPa)といわれており、安全率で2しか取れていないことが解ります。
 図10 SPMモータの回転子モデル形状
図10 SPMモータの回転子モデル形状
 図11 回転時に磁石に生じる応力集中
図11 回転時に磁石に生じる応力集中
磁石が回転子の中に埋まっているIPMモータでは、磁石自身の遠心力を支えるコアのブリッジ部に荷重が集中します。磁気回路側の要求としてはロータ内の漏れ磁束を抑える為にブリッジ部を細く設計したいのですが、細くしすぎると遠心力を支えることが出来なくなってしまいます。したがって、磁気回路と機械強度の双方を満足させる形状を実現する必要があります。これらの検討のためには、磁界回路は磁界解析で評価し、回転機械強度は構造解析で評価することになります。IPMモータのブリッジ部に生じる応力分布を示します(図12、13)。
 図12 IPMモータの回転子モデル形状
図12 IPMモータの回転子モデル形状
 図13 回転時にブリッジ部に生じる応力集中
図13 回転時にブリッジ部に生じる応力集中
出力特性の調整
モータの高回転化に伴い、損失における鉄損の割合も増加しており、高出力モータでは銅損と鉄損が同等というようなモータも出てきています。モータの高効率化を実現する上で、鉄損をどう抑えるかが設計で重要になっていきます。余裕を持った磁路により動作磁束密度を下げることや、低損失の材料を用いることで鉄損を低減することは実現できますが、モータの大型化や高コスト化を招くので、容易に採用することは出来ません。
したがって、設計者が知恵を絞るのは、全域で高効率で実現することは諦め、運転時間の長い出力域では高効率を実現し、運転時間の短い出力域での効率に目を瞑りつつ、必要な最大トルクを確保した上で、コストや体格、出力を高度にバランスさせるようなメリハリのある設計が要求されます。
同じスタンプ形状のモータの磁石をBr1.2(T)からBr1.0(T)の材料に置換し、その低下分をコイル巻数で回復してトルク定数を同じに保った場合の出力特性の変化を、効率マップで示したものです(図14)。トルク定数が同じになるようにしているので、変更前後で最大トルクに差は出ませんが、銅損の増加により、3000(rpm)時のトルクが2.6(N・m)から2.1(N・m)に低下し、出力が大きく低下していることが分ります。同様に6000(rpm)時のトルクに注目すると、1.5(N・m)から1.0(N・m)に低下しています。ただし、効率自体はどちらも広い範囲で90%以上を実現しているので、磁石の特性を下げてコスト低減を優先する可能性についての示唆も得られることが分ります。
 図14 出力特性と効率分布の差
図14 出力特性と効率分布の差
(左;磁石Br1.2(T)の効率マップ、右;磁石Br1.0(T)の効率マップ)
トルク変動の低減
モータの性能や品質を高めるためには、振動や騒音の源となるトルク変動の低減も要求されています。トルク変動はモータ構造だけではなく相電流波形の影響も受けますので、FEAによる解析が必須となります。
通電電流に高次成分を加えることで、トルク波形を変化できます。正弦波電流で駆動した場合と三次電流を加えた場合によるトルク変動を解析した結果を示しています(図15、16)。基本波5(A)に対し、3次成分0.5(A)重畳したときと1.0(A)重畳した場合でトルク波形に差を生じていることが確認できます。この検討ではトルク変動をゼロにするところまでの結果を得ることは出来ませんでしたが、重畳する次数毎の振幅と位相を整えていけば、トルク変動をゼロに抑える通電波形をも導くことも可能になります。
 図15 三次高調波を重畳した相電流波形
図15 三次高調波を重畳した相電流波形
 図16 通電電流によるトルク変動の変化
図16 通電電流によるトルク変動の変化
おわりに
"モータ設計にFEAは有効か?"の第2回目では詳細設計で活きるFEAの活用事例を紹介しました。事例としては永久磁石モータの検討項目にフォーカスした形となりましたが、設計対象が誘導電動機やSRモータでも同様です。
いまや、モータの詳細設計を行う為には、FEAの活用が欠かせないことをご理解頂けたのではありませんでしょうか。ここまでの検討を手計算や経験だけで、行うことはほぼ不可能と言えます。
念のため、述べておきますが、FEAさえあれば良い設計ができるということを言うつもりはありません。モータ設計をしたことがない技術者は、如何にFEAの操作に長けていたとしても、そこから得られた結果を設計に反映することはできません。モータ設計に長けた技術者こそが、FEAを利用することで更によい設計を行えると言うことを知って頂きたいと思っています。
次回は本シリーズのまとめとなりますが、FEAを用いることで、更に詳細なモータ設計が行える事を紹介したいと考えています。特に、実機で問題が起こった際の原因究明などで威力を発揮することをご紹介しようと考えています。
[JMAG Newsletter 2013年3月号より]