- 現在、Webシステム障害により、パスワード設定・ログイン・各種申請が正常に行えません。ご不便をおかけし申し訳ございません。
JMAG-RT Viewer
-

AIで進化するスマートモーター制御技術 ~ バーチャルセンサーと故障検出 ~
MathWorks Japan 片桐 敦
-
[W-MB-181] JMAG-RT空間高調波モデルの精度検証 ~微分法モデル、積分法モデルとFEAとの比較~
JMAG-RTは、モータの非線形特性を表現できるモータモデルとして、SILを用いた制御回路設計やHIL上でのテスト等に利用されている。JMAG-RTでは種々のモータモデルを取り揃えているが、現在最も…
-

モーター制御システム開発の効率化はモデルベースで解決
MathWorks Japan 片桐 敦
-
[JAC217] 三相誘導電動機の効率マップ作成
ここでは、JMAG-RT Viewerを使用し、駆動温度を変更した場合の三相誘導電動機の効率マップを作成しています。
-

[JFT141] JMAG-DesignerにおけるJMAG-RTモデルデータファイルの作成機能
本資料では、JMAGで得られた効率マップ/損失マップをJMAG-RTモデルデータファイルとして出力し、得られたプロットをJMAG RT-Viewerで確認する方法を学習します。
-
[W-MB-152] ECU機能検証に必要なモータプラントモデルの精度
ECU機能検証は正常系から異常系まで様々な条件下で行われる。またモータの駆動状態としてもトルク、回転数ともに幅広い領域で検証が行われる。通常、ECU機能検証では空間高調波を考慮しないDQ…
-
[JFT133] システムレベルシミュレーションにおけるシステム損失評価
本資料では、JMAGで得られた効率マップ/損失マップをファイル出力し、回路シミュレーションを使用してモード走行時のシステム損失を把握する方法を学習します。
-

SCALEXIO HILによるJMAGモーターモデルのリアルタイムシミュレーション
dSPACE Japan株式会社 大段 智志
-
[W-MO-85] 高調波損失を考慮した効率マップ評価
本稿では電磁界解析・回路・制御の連成解析によりキャリア高調波とAC銅損の影響を考慮し効率を算定する方法を提案した。キャリア高調波とAC銅損の影響を考慮することで、低速、低トルクの動作…
-

[JAC255] 3次元補正を用いたIPMモータのN-Tカーブ評価
ここでは、補正機能を使ってN-Tカーブを求めた事例をご紹介します。
-
[W-MB-63] JMAG-RTモデルの最適な分解能の決定方法
本資料では、システムシミュレーションを行いながら反復的にJMAG-RTモデルの分解能をあげる方法を提示する。
-
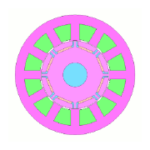
[RTML-026] PMSM/IPM 連続定格 100(kW) 3相
型式:PMSM 出力:100(kW) ステータ外径:250(mm) 積厚:250(mm) 電源:DC500(V)/400(A) ロータ:IPM(-字) 平均トルク:177(N·m)
-
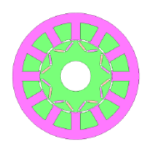
[RTML-027] PMSM/SPM 連続定格 100(kW) 3相
型式:PMSM 出力:100(kW) ステータ外径:250(mm) 積厚:181(mm) 電源:DC500(V)/400(A) ロータ:SPM 平均トルク:178(N·m)
-
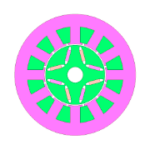
[RTML-001] PMSM/IPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:54(mm) 積厚:51(mm) 電源:DC100(V)/20(A) ロータ:IPM(V字) 平均トルク:3.6(N·m)
-
[RTML-028] PMSM/IPM 連続定格 100(kW) 3相
型式:PMSM 出力:100(kW) ステータ外径:250(mm) 積厚:340(mm) 電源:DC500(V)/400(A) ロータ:IPM(V字) 平均トルク:178(N·m)
-
[RTML-029] PMSM/IPM 連続定格 100(kW) 3相
型式:PMSM 出力:100(kW) ステータ外径:250(mm) 積厚:287(mm) 電源:DC500(V)/400(A) ロータ:IPM(-字) 平均トルク:178(N·m)

