Overview
In general, the characteristics of motor models used in control circuit simulation of a motor drive system are often assumed to be constant when the motor is in drive mode. This is because the cost of modeling is low and evaluation items are averaged characteristics such as steady-state torque during control.
However, the effects of the harmonic components cannot be ignored when controlling the motor to maximize motor performance at high speed (field-weakening region).
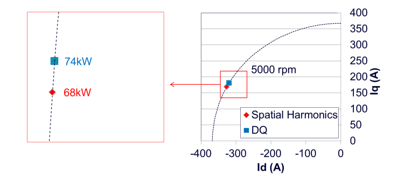
Fig. 1 Effect of harmonic components on control current vector during maximum output control
When field-weakening control causes currents and voltages to hit power supply constraints, the instantaneous value of the induced voltage causes a difference in the current vector obtained when harmonic components are or are not taken into account. The current vectors of maximum output at the same speed are different for a model (DQ) without harmonic components compared to a model with harmonic components (Special Harmonics). A difference of 4 degrees for current phase and 8% for output occurs. (The dotted line indicates the current limit circle).
You need to sign in as a Regular JMAG Software User (paid user) or JMAG WEB MEMBER (free membership).
By registering as a JMAG WEB MEMBER, you can browse technical materials and other member-only contents for free.
If you are not registered, click the “Create an Account” button.
Create an Account Sign in


