MATLAB/Simulink
- Sort condition
- Newest first
- Oldest first
- Large number of views
-
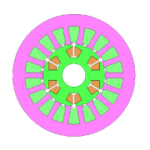
[RTML-058] IM Constant rating 10(kW)
Type: IM | Max Power: 10(kW) | Stator(Outside Diameter): 92.5(mm) | Height: 37(mm) | Voltage/Current: DC440(V)/200(A) | Rotor/Mover: Cage
-
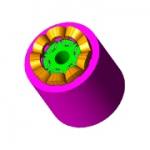
[RTML-059] IM Constant rating 100(kW)
Type: IM | Max Power: 100(kW) | Stator(Outside Diameter): 125(mm) | Height: 259(mm) | Voltage/Current: DC600(V)/400(A) | Rotor/Mover: Cage
-
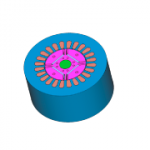
[RTML-060] IM Constant rating 100(kW)
Type: IM | Max Power: 100(kW) | Stator(Outside Diameter): 200(mm) | Height: 65(mm) | Voltage/Current: DC500(V)/600(A) | Rotor/Mover: Cage
-
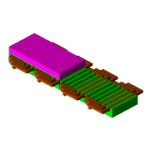
[RTML-052] WFSM_04
Type: WFSM | Max Power: 10(kW) | Stator(Outside Diameter): 185(mm) | Height: 40(mm) | Voltage/Current: DC240(V)/84.8(A), DC300(V)/50(A) | Rotor/Mover: WF | Number of Phases: 3
-
[RTML-053] WFSM_05
Type: WFSM | Max Power: 10(kW) | Stator(Outside Diameter): 185(mm) | Height: 50(mm) | Voltage/Current: DC240(V)/84.8(A), DC300(V)/35(A) | Rotor/Mover: WF | Number of Phases: 3
-
[RTML-054] WFSM_06
Type: WFSM | Max Power: 75(kW) | Stator(Outside Diameter): 212(mm) | Height: 200(mm) | Voltage/Current: DC600(V)/250(A), DC200(V)/20(A) | Rotor/Mover: WF | Number of Phases: 3
-
[RTML-055] WFSM_07
Type: WFSM | Max Power: 75(kW) | Stator(Outside Diameter): 212(mm) | Height: 200(mm) | Voltage/Current: DC600(V)/250(A), DC600(V)/45(A) | Rotor/Mover: WF | Number of Phases: 3
-
[RTML-056] WFSM_08
Type: WFSM | Max Power: 75(kW) | Stator(Outside Diameter): 400(mm) | Height: 65(mm) | Voltage/Current: DC500(V)/283(A), DC600(V)/50(A) | Rotor/Mover: WF | Number of Phases: 3
-
[RTML-051] WFSM_03
Type: WFSM | Max Power: 10(kW) | Stator(Outside Diameter): 115(mm) | Height: 150(mm) | Voltage/Current: DC240(V)/84.8(A), DC300(V)/15(A) | Rotor/Mover: WF | Number of Phases: 3
-
[JAC214] Monitoring the Radial Force Acting on the Teeth of IPM Motors Using Circuit Control Simulation
In this example, an IPM motor as a JMAG-RT model is captured in a control/circuit simulator, and radial forces acting on the teeth during motor driving is monitored while changing…
-

[JFT011] Tooth Electromagnetic Force Monitoring During Control Simulation
This document describes the preparation involved for outputting tooth electromagnetic force when creating a JMAG-RT model, MATLAB/Simulink settings, and the displaying of the obta…
-
[JAC037] Vector Control Analysis of an IPM Motor Using Control Simulator and the JMAG-RT
The purpose of this Application Note is to demonstrate how to import a JMAG-RT model to a control/circuit simulator after using the JMAG-RT to obtain the inductance spatial harmon…
-
[JAC134] Speed Control Analysis of a Permanent Magnet Linear Motor Using the Control Simulator and the JMAG-RT
This Application Note presents how to use JMAG-RT to obtain the spatial harmonics and current dependency of the thrust and coil inductance, and import them to a circuit/control si…
-
[JAC291] Control Simulation of Switching Number of Poles in a 6-Phase Induction Machine
In this document, the behavior of a 6-phase induction motor during the switching of the number of poles is evaluated by simulation.
-
[JAC215] Simulation of an IPM Motor with a Delta Connection Using a Control Simulator and JMAG-RT
In this example, a JMAG-RT model is incorporated into a control/circuit simulator to monitor the circulating current when an IPM motor is being driven.
-
[JAC162] Drive Simulation of an SR Motor using a Control Simulator and JMAG-RT
In this Application Note, after using JMAG-RT to obtain an SR motor’s torque and inductance characteristics, the JMAG-RT model is imported into a circuit/control simulator, voltag…

