株式会社SUBARU
技術本部 パワートレイン設計部 主査(MG制御)
森村 暢夫、高野 悠
概要
制御開発プロセスにおいてモータ挙動を忠実に評価する必要がある場合、テストベンチでの実機を用いた試験が行われてきた。しかし、実機ベースでの評価は試験環境条件の変動影響排除のために繰り返し試験が必要となる。さらに、インバータの過変調領域近傍や、電圧進角を制御するトルクFB制御といった制御システムの非線形性が顕著な領域では、制御定数をチューニングするためにより一層多くの評価工数が必要となる。モータの高回転・高トルク化の潮流により、今後も評価工数は増大することが見込まれる。
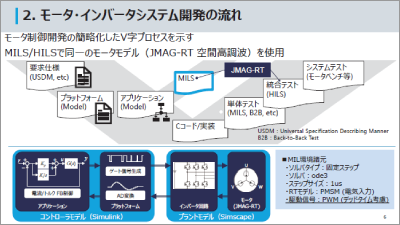
これらの課題に対して、我々はオートコード可能なコントローラモデル、モータ挙動を忠実に再現可能なJMAG-RTモデルを含むMIL環境を用いて、机上検討化と適合評価の工数低減に取り組んでいる。
本稿では、MILSと実機評価の比較による適合結果の妥当性と有用性について述べる。また、MILSでしばしば課題となる、計算工数の増大に対する高速化の事例も併せて紹介する。

講演論文を閲覧いただくには、サインインが必要です
こちらは会員限定コンテンツです。『JMAGソフトウェア正規ユーザー(有償会員)』または『JMAG WEB MEMBER(無料会員)』でサインインが必要です。
『JMAG WEB MEMBER(無料会員)』へ登録することで、技術資料やそのほかの会員限定コンテンツを無料で閲覧できます。
登録されていない方は「新規会員登録」ボタンをクリックしてください。



