RT
回路/制御シミュレータ用モータモデル生成 (JMAG-RT)
-
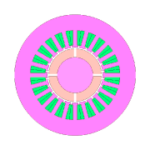
[RTML-040] PMSM/SPM 連続定格 1(kW) 6相
型式:PMSM 出力:1(kW) ステータ外径:53.4(mm) 積厚:37.5(mm) 電源:DC100(V)/10(A) ロータ:SPM 平均トルク:4(N·m)
-

[RTML-041] PMSTEP_01
型式:PMSTEP ステータ外径:60.0(mm) 積厚:24(mm) 電源:DC24(V) ロータ:PM
-
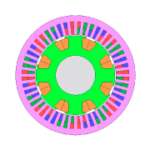
[RTML-042] SynRM_01 3相
型式:SynRM 出力:0.01(kW) ステータ外径:150(mm) 積厚:37.5(mm) 電源:DC288(V)/5(A) ロータ:RM 平均トルク:0.8(N·m)
-
[RTML-043] SRM_01 3相
型式:SRM 出力:0.5(kW) ステータ外径:160(mm) 積厚:75(mm) 電源:DC150(V) ロータ:RM
-
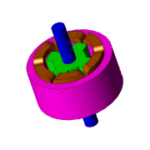
[RTML-044] WFSM_01
型式:WFSM 出力:2(kW) ステータ外径:260(mm) 積厚:60(mm) 電源:DC200(V)/20(A)、DC100(V)/10(A) ロータ:WF 相数:3
-
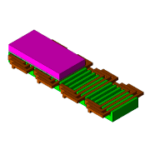
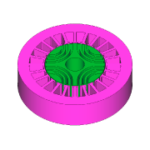
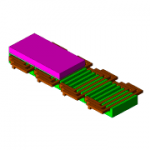
[RTML-045] LSM_01
型式:LSM 出力:2(kW) 電源:DC400(V) ロータ:SPM
-

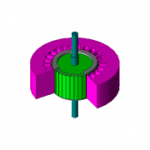
[RTML-046] ALTERNATOR_01
型式:ALTERNATOR、ステータ外径:140(mm)、積厚:45(mm)、電源:DC200(V)
-
[JAC166] 制御シミュレータとJMAG-RTを用いた誘導電動機のラインスタートシミュレーション
ここでは、JMAG-RTを用いて誘導電動機のJMAG-RTモデルを作成し、制御/回路シミュレータへ取り込んで、誘導電動機のラインスタートシミュレーションを行います。
-
[JAC041] 制御シミュレータとJMAG-RTを用いた永久磁石型リニアモータの位置決め制御解析
ここでは、推力やコイルのインダクタンスの空間高調波、電流依存性をJMAG-RTを用いて求めた後、JMAG-RTモデルとして制御/回路シミュレータへ取り込んで、永久磁石型リニアモータの位置を目標値…
-

日産のEV戦略とモータ開発の歩み ~ モータ開発を支えるJMAGへの期待 ~
日産自動車株式会社 大木 俊治
-
自動車駆動用誘導電動機へのJMAG-RTモデル適用の検討
東京工業大学 千葉 明
-
The Role of JMAG on Powertrain Development
Albert Li, Gogoro Inc.
-
多ケース同時計算によるJMAG-RT活用事例
日本電産株式会社 上田 智哉
-
モデルベース開発(MBD)におけるJMAGの取り組みについて
株式会社JSOL 佐野 広征
-
Simulation based design validation and optimisation of Electrical machines for automotive applications
Lucas-TVS Ltd., M.P.Ragavendra
-
JMAG-RTをもちいたモータHILSによる制御開発と検証事例
富士重工業株式会社 森田 知洋

