回路 / 制御
-
[RTML-039] SOLENOID_01
型式:SOLENOID 電源:DC12(V)
-
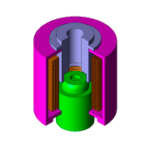
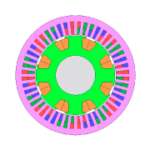
[RTML-040] PMSM/SPM 連続定格 1(kW) 6相
型式:PMSM 出力:1(kW) ステータ外径:53.4(mm) 積厚:37.5(mm) 電源:DC100(V)/10(A) ロータ:SPM 平均トルク:4(N·m)
-

[RTML-041] PMSTEP_01
型式:PMSTEP ステータ外径:60.0(mm) 積厚:24(mm) 電源:DC24(V) ロータ:PM
-
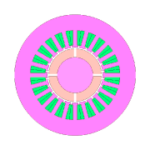
[RTML-042] SynRM_01 3相
型式:SynRM 出力:0.01(kW) ステータ外径:150(mm) 積厚:37.5(mm) 電源:DC288(V)/5(A) ロータ:RM 平均トルク:0.8(N·m)
-
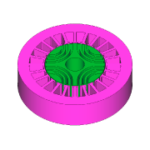
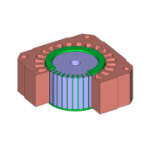
[RTML-043] SRM_01 3相
型式:SRM 出力:0.5(kW) ステータ外径:160(mm) 積厚:75(mm) 電源:DC150(V) ロータ:RM
-
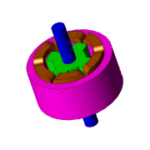
[RTML-044] WFSM_01
型式:WFSM 出力:2(kW) ステータ外径:260(mm) 積厚:60(mm) 電源:DC200(V)/20(A)、DC100(V)/10(A) ロータ:WF 相数:3
-
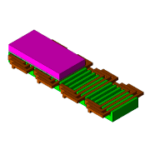
[RTML-045] LSM_01
型式:LSM 出力:2(kW) 電源:DC400(V) ロータ:SPM
-

[RTML-046] ALTERNATOR_01
型式:ALTERNATOR、ステータ外径:140(mm)、積厚:45(mm)、電源:DC200(V)
-

[L-MB-31] JMAG-RTモデルによるモータの内部状態モニタリング
これまでモータのプラントモデル”JMAG-RTモデル”では電流やインダクタンスなどモータ方程式で用いられる物理量を出力できましたが、今回指定した任意の物理量を出力できるようになりました。出…
-
[L-MU-93] JMAG/Adams/Simulink連携による車両走行シミュレーション
電気自動車で使用される駆動用モータは一般的にはエンジンよりも振動が小さいと言われていますが、トルクの脈動(トルクリップル)による振動が車両全体に伝わり問題となることがあります。従…
-
[L-MB-82] FEAモデルを短時間でプラントモデルへ
モデルベース開発(以下MBD)では、実機を高精度に模擬できるプラントモデルが要求されるため、高精度の特性情報を抽出できるFEAの利用が増えています。一方で、高精度化に伴い増加するモデル…
-
[L-MB-79] 制御系を考慮した回路連成機能
磁気設計において過渡的な応答特性を評価するためには、基本特性だけでなく、制御系を考慮しなければならない場合があります。特に駆動系を持つ磁気デバイスでは、制御系を考慮することで実際…
-
[L-MO-77] JMAG-ExpressとJMAG-RT Viewerでモータ概念設計
開発プロセスの上流であるシステム設計において、モータはロータタイプ、極数、スロット数、巻数、ロータ直径など要求を満たすように大まかに仕様を決定します。
-
[L-MB-55] JMAG-RTを用いた制御回路シミュレーションのための高精度プラントモデルの生成
自動車産業の電動化に伴い、複雑な回路をもつ多くの新しい電気機器が登場してきています。 例えば、EV/HEVにおいては三相モータが広く利用されてきましたが、システムに対してより高い信頼性が…
-
[L-MO-89] モータ設計ツールJMAG-Express
JMAG-Expressはモータ設計ツールです。電卓のように、瞬時にモータ特性を計算し、要件を満足する設計仕様を出力します。有限要素法をベースにしているため、モータの微細な形状や高負荷時の磁…
-
[JAC229] PWMを考慮した誘導電動機の鉄損解析
ここでは、PMW制御を考慮した誘導電動機でスタディを作成する方法について説明します。

