回路 / 制御
-

多段噴射に対応したインジェクタ弁挙動シミュレーション回路モデルの開発
日立オートモティブシステムズ株式会社 吉成 幸広
-
1D-3D シミュレーションによるIPM モータの効率評価および実機実証
スズキ株式会社 赤木 亮介
-
力制御型メディカルロボットアームにおける、アクチュエータ低振動化検討
ソニーイメージングプロダクツ&ソリューションズ株式会社 福島 哲治
-
空調機用ターボ圧縮機における磁気軸受の高軸支持力化の解析
ダイキン工業株式会社 入野 裕介
-
PWMインバータで駆動する永久磁石同期モータの電磁力解析
日立オートモティブシステムズ株式会社 星野 勝洋
-
[W-MB-102] モデルベース開発とシミュレーションによるモータ効率マップ評価⽅法
本報告では概念設計、詳細性能評価における効率マップ⽣成評価⽅法について解説する。また、マップに求められる精度、⽣成コストについて説明する。
-

[L-MB-33] モータドライブ開発を支援する JMAG-MATLAB/Simulink連携
JMAGは、MATLAB/Simulink(以下Simulink)を開発するMathWorksと共同で、EV/HEVをはじめとしたモータドライブ開発に有用なモデルベース開発(以下MBD)を強力に支援します。モータドライブシス…
-
[L-MB-32] 制御時機器の応答性を高い精度で再現する直接連携解析
電磁弁やインジェクタなど制御に対して高速な応答性が求められる機器では、制御の高度化に伴いシミュレーションに求められる精度が高くなってきています。これらの機器では制御・回路シミュレ…
-
[L-MB-28] モデルベース開発に組み込まれるJMAG
モデルベース開発(以下MBD)では、実機を高精度に模擬できるプラントモデルが要求されます。実機相当のプラントモデルを利用することによって、設計工程における事前検証やモデルを介した誤解…
-
[L-MB-30] JMAG-RTで制御時のモータ特性を正確にとらえる
JMAG-RTモデルは高調波成分も含んだ実機に対して高い再現性をもったモータモデルです。モータの性能を最大限まで引き出すような制御を実機製造を待たずに検討することが可能になります。
-
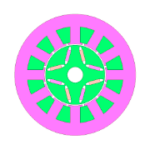
[RTML-001] PMSM/IPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:54(mm) 積厚:51(mm) 電源:DC100(V)/20(A) ロータ:IPM(V字) 平均トルク:3.6(N·m)
-
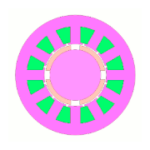
[RTML-002] PMSM/IPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:54(mm) 積厚:54(mm) 電源:DC100(V)/20(A) ロータ:IPM(-字) 平均トルク:3.6(N·m)
-
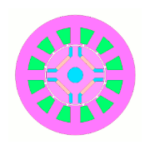
[RTML-003] PMSM/SPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:53(mm) 積厚:36(mm) 電源:DC100(V)/20(A) ロータ:SPM 平均トルク:3.6(N·m)
-

[RTML-004] PMSM/IPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:54(mm) 積厚:77(mm) 電源:DC100(V)/20(A) ロータ:IPM(V字) 平均トルク:3.6(N·m)
-

[RTML-005] PMSM/IPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:54(mm) 積厚:80(mm) 電源:DC100(V)/20(A) ロータ:IPM(-字) 平均トルク:3.6(N·m)
-
[RTML-006] PMSM/SPM 連続定格 1(kW) 3相
型式:PMSM 出力:1(kW) ステータ外径:53(mm) 積厚:46(mm) 電源:DC100(V)/20(A) ロータ:SPM 平均トルク:3.6(N·m)

