概要
電気自動車、ロボットなどモータを用いる機器の普及に伴い、モータには静粛性、安全性が要求されるようになっています。それによりモータの制御では磁束波形を正弦波にコントロールするなどこれまで使わなかった情報を用いることが要求されています。モータ設計でも実際の制御時に加振力の変動を閾値以下に抑えるなどの対策が求められます。これらを達成するためには制御時のモータの内部を観察することが有効です。
これまでモータのプラントモデル”JMAG-RTモデル”では電流やインダクタンスなどモータ方程式で用いられる物理量を出力できましたが、今回指定した任意の物理量を出力できるようになりました。出力される物理量は制御シミュレーション実行時にリアルタイムにモニタリングすることができ、制御情報として利用する、振動を抑制する制御方法や磁気回路設計を検討する、などの目的に利用できます。
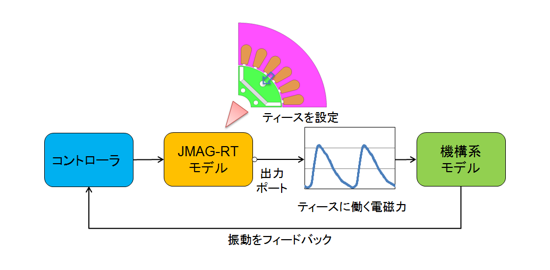
図1 電磁力の出力例
制御シミュレータ内のJMAG-RTモデルの出力ポートから設定した物理量が出力される。例えば出力された電磁力を機構系モデルに入力し、振動を計算して制御系にフィードバックするようなことが可能である。
続きを読むには、サインインが必要です
こちらは会員限定コンテンツです。『JMAGソフトウェア正規ユーザー(有償会員)』または『JMAG WEB MEMBER(無料会員)』でサインインが必要です。
『JMAG WEB MEMBER(無料会員)』へ登録することで、技術資料やそのほかの会員限定コンテンツを無料で閲覧できます。
登録されていない方は「新規会員登録」ボタンをクリックしてください。


