
週に2回、火曜日と金曜日に、TECHNO-FRONTIER開催に先んじて、詳細情報を更新します。
ぜひ定期的にチェックください。
尚、TECHNO-FRONTIER展では、関係する技術資料をバインドして一括してダウンロードいただけるよう準備しています。
9/8からの展示会もどうぞお楽しみに!
開催概要
| 主催 | 一般社団法人日本能率協会 |
| 会期 | 2020年9月8日(火) 10:00 ~ 2020年9月18日(金) 17:00 会期延長[9月28日(月) 10:00 ~ 10月2日(金) 17:00] |
| 会場 | オンライン |
| URL | https://jma-tf.com/virtual/ |
| ブース |
https://jma-webexhibition.com/exhibitors/detail/108
または、サイト内で |

出展者セミナー
出展者セミナーで弊社鈴木が発表します。
電動化におけるキーコンポーネントであるモータに要求されるのはコンポーネントとしての高い性能だけでなくシステムとの高い整合性です。シミュレーションを活用したモデルベース開発はモータ開発においても必須になりつつあります。
モータ設計で高い実績を持つJMAG がモデルベース開発のための新しいワークフローを提案します。
本セミナーでは、EV用のモータ開発が、システム設計、コンポーネント設計、試作・性能評価、システム検証を具体的にどう進めるかを示します。事例を通して、モータの効率マップ、鉄損や巻線の交流損などの各種損失、冷却、振動評価から制御パラメータの適合、走行モードでの効率検証までを紹介します。
これからJMAGを使ってモータ設計を検討される方に向けて、JMAGがもつ機能の全体を俯瞰いただける内容となっています。お誘いあわせの上ご参加ください。
来場者登録後、セミナーにお申し込みください。
資料ダウンロード
電動化におけるキーコンポーネントであるモータに要求されるのはコンポーネントとしての高い性能だけでなくシステムとの高い整合性です。
シミュレーションを活用したモデルベース開発はモータ開発においても必須になりつつあります。
モータ設計で高い実績を持つJMAGが、モデルベース開発のための新しいワークフローを提案します。試作レスやフロントローディングが可能となり、開発期間とコストを大幅に削減します。
本資料では、EV用のモータの開発が、システム設計、コンポーネント設計、試作・性能評価、システム検証の中で具体的にどのように進んでいくかを紹介しています。
なお、ここで示されるのは既存のワークフローではなくシミュレーションをベースとしたモデルベース開発のワークフローです。
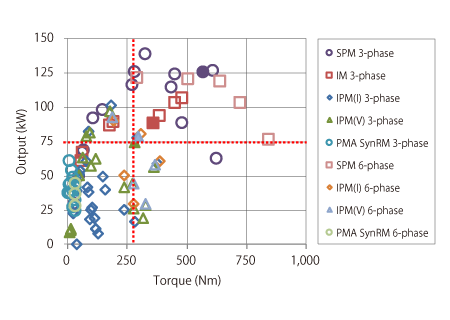
■ 1.システム設計(極数・スロット数・モータタイプを振った設計探査)
ここでは、要求の最大出力、最大トルクを満たすかどうかを確認しています。SPMモータ、I字のIPMモータ、V字のIPMモータ、誘導電動機が要求を満たすことが分かります。
最終的にはWLTC走行モードでの性能を重視し、I字のIPMモータを採用しました。
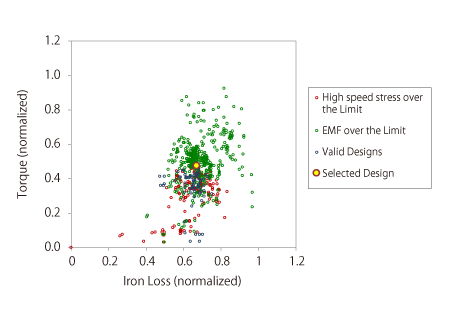
■ 2.コンポーネント設計(ロータ形状の最適化)
掲載の図は、JMAGの最適化計算機能を用いて探索を行った結果を示しています。青い点が制約を満たす設計案となり、その中でもトルク最大の設計案を採用しました(図中の黄色い点)。
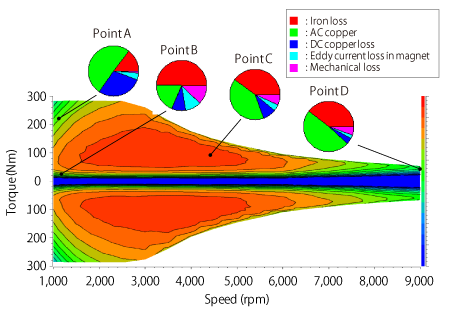
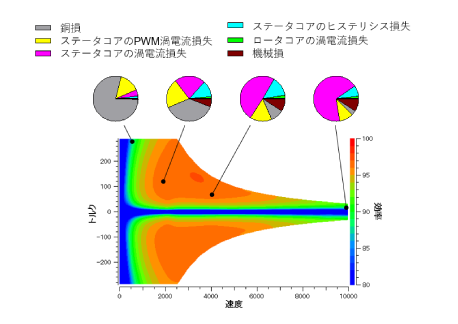
■ 3.試作・性能評価(高精度効率マップと損失割合)
図中では、4つの代表的な動作点での損失の内訳を示しています。低速高負荷時(図中のPoint A)は直流銅損および交流銅損、中速時(図中のPoint C)や高速時(図中のPoint D)は鉄損及び交流銅損の割合が高くなっていることが分かります。
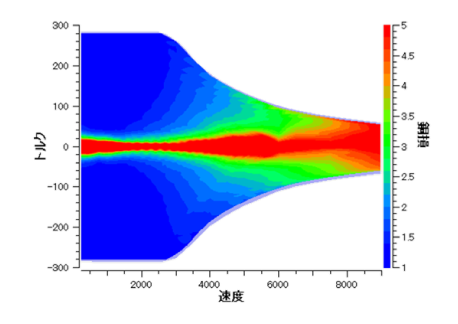
■ 4.システム検証(ドライブラインの振動評価)
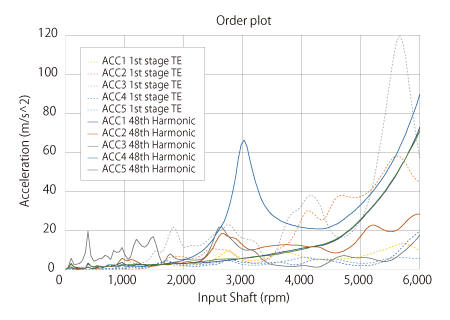
システム検証ではモータだけでなく、ギアボックス、インバータ、ハウジングを含めた形で振動評価を行います。ここで考慮する加振源は、ギアの伝達誤差とモータの電磁力です。
掲載の図は、横軸を速度、縦軸を加速度として振動を評価しています。電磁加振力によりギアボックスが振動するなど、コンポーネント単体の設計時では見えなかった現象も捉えることができています。
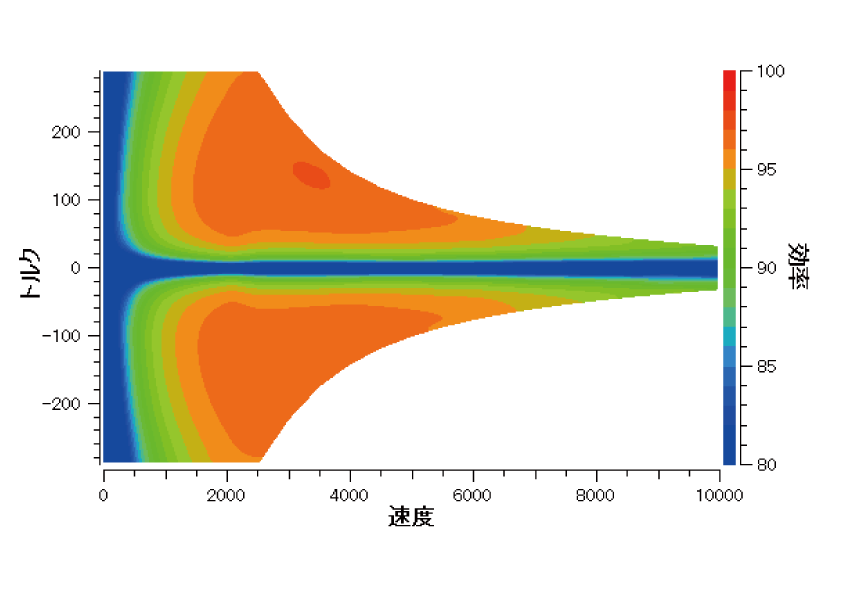
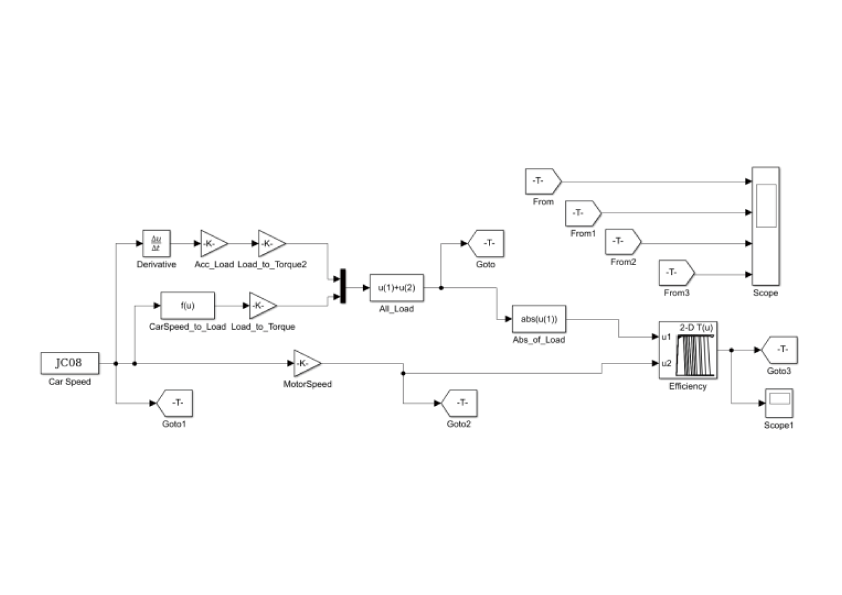
駆動用モータの動作範囲は広く、効率マップを用いてモータ性能を評価します。また、走行モードに対する電費、航続距離の算出にも効率マップは有用であり、モータ設計の要件を示す目的でも使用されます。
市街走行の多い車両であれば低速~中速、競技用の車両であれば中速~高速時での高効率が求められます。車両ごとに求められる効率マップ要件は異なり、制御も含めたモータドライブ開発が必要です。
システム設計フェーズでは、モータ種別、極・スロットコンビネーションの検討も含めた大域的な設計探査が必要です。ここでは短時間で多数の効率マップを描画し、要件に見合ったモータの開発方針を定めます。
試作・性能評価フェーズではモータと制御回路を連携させることで実駆動状態を再現させます。シミュレーションベースで開発を完遂するには実測効率誤差1%以内の精度が必要であり、JMAGでそれを達成した実績とポイントをご紹介します。
■ 効率マップと各動作点の損失割合
損失割合を見ると、ステータコアの渦電流損失が回転数に応じて増加していることがわかります。
一方で、PWM渦電流損失は低速側の方が大きい割合を占めています。
■ 交流銅損の考慮の有無による銅損の比率
高速域で後者の銅損が大きく増加しており、これは空間高調波によるものです。
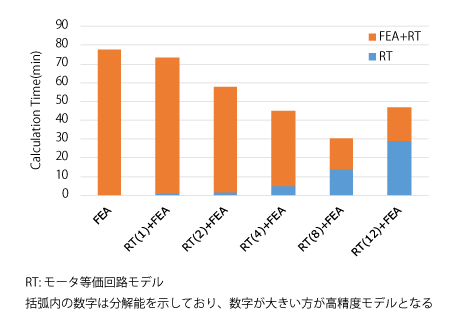
■ 効率計算時間の比較
モータ等価回路モデルの精度を高めるほどFEA計算を早期に定常化させ、トータルの計算時間を短縮することができます。
ただし、モデルの精度を必要以上に上げると、計算時間が増加してしまうことを示しています。
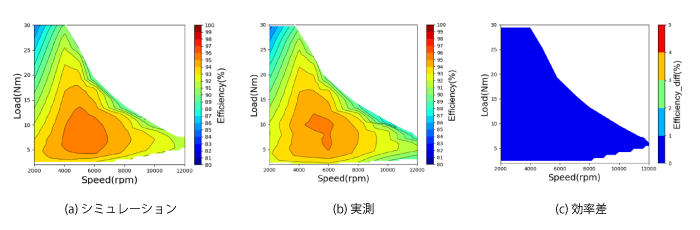
■ 効率マップの比較
効率を高精度に推定するために、シミュレーションではPWMキャリア成分、交流銅損に加え、応力や加工歪などビルディングファクターも考慮しています。
この例では、運転領域全域において誤差が1%以下に収まる結果となりました(c)。
実測効率誤差1%以内を達成するとはどういうことかを考えてみます。例えば入力100kW、効率90%の状態を想定すると、損失は10kWとなります。これを効率誤差1%で評価するということは、損失誤差10%以内の精度が必要ということになります。
コア鉄損の算出に関して、JMAGは1D法、プレイモデルを採用しており、任意の駆動状態に対して古典的渦電流損失、ヒステリシス損失を高精度に算出することができます。本資料では、それぞれの有効性と適用限界を示します。また、量産時に問題となる応力、加工歪による損失をとらえるためのモデリング手法について示します。
銅損及び漂遊損は空間に広がる漏れ磁束によってもたらされるため、机上計算による推定は困難です。これら損失を高精度かつ短時間でとらえるための方法について示します。
■ ロータ表面の渦電流分布(三次元解析)
一方で、1D法は渦電流の面内方向成分は考慮できますが、厚み方向成分は考慮できません。
ロータコアの鋼板1枚中の渦電流分布をみると、スロット高調波によって局所的に還流していることが確認できます。
この局所的な還流は面内方向成分に対して厚み方向成分が有意な割合となっており、三次元解析と1D法の差異要因となります。
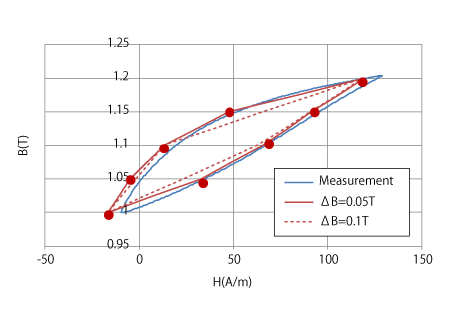
■ マイナーループと対称ループの分解能
測定データである対称ループの磁束密度の刻みが0.1Tでも振幅0.1Tのマイナーループを描くことは可能ですが、4点で近似されるため精度が不足します(図中の赤い破線)。
正確に再現するためには0.05T刻みの対称ループ群が必要であることを示しています(図中の赤い実線)。
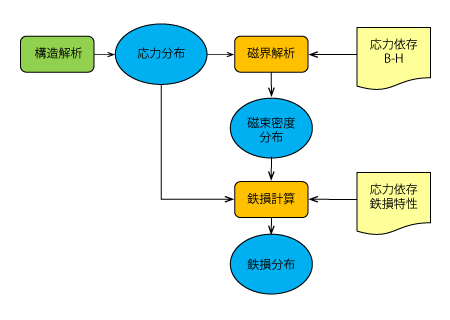
■ 応力を考慮した鉄損評価の流れ
磁界解析では磁化特性(B-Hカーブ)の応力依存性を考慮し、磁束密度分布を求めます。
鉄損特性の応力依存性を考慮し、応力の影響を反映させた鉄損を計算します。
なお、必要な材料特性も入手しやすくなってきており、実用段階に入ったと言えます。
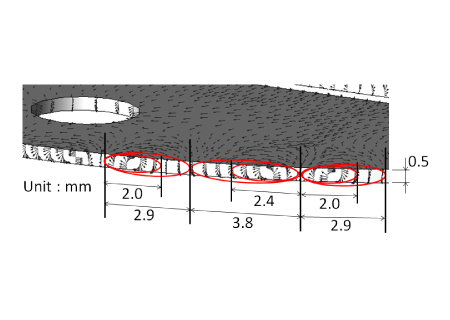
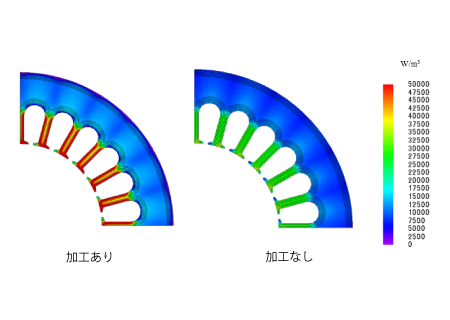
■ 加工の有無によるヒステリシス損失密度分布の比較
加工によって、損失特性が劣化する切断面付近で損失が増加していることが分かります。
また、バックヨーク内部においても損失密度が高くなっていることがわかります。これは、劣化領域の透磁率が低下し、磁束が非劣化領域に集中するためです。
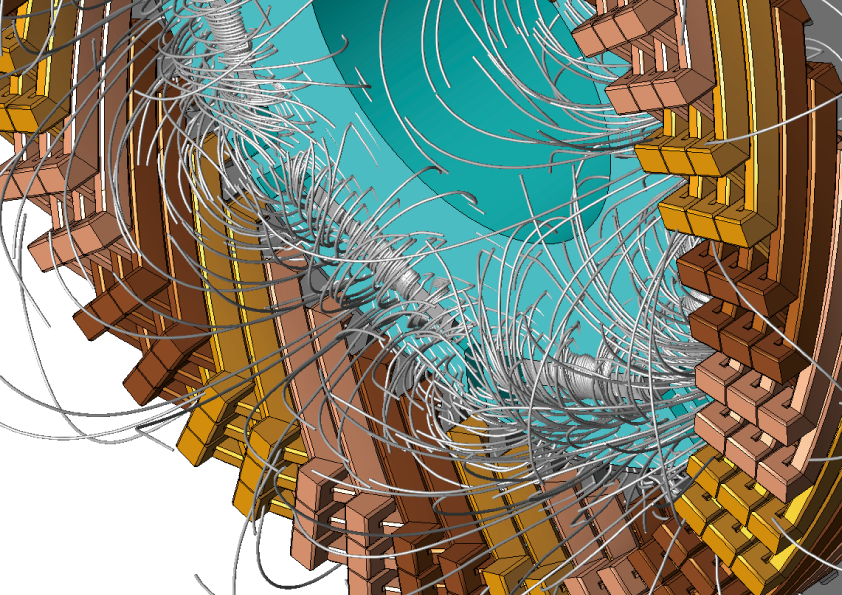
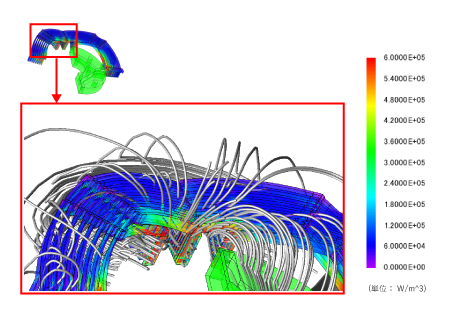
■ コイルエンドの損失分布とフラックスライン
磁束がギャップをまたぐ際にコイルエンドを鎖交する箇所で、コイルエンドの損失が増加している様子が分かります。
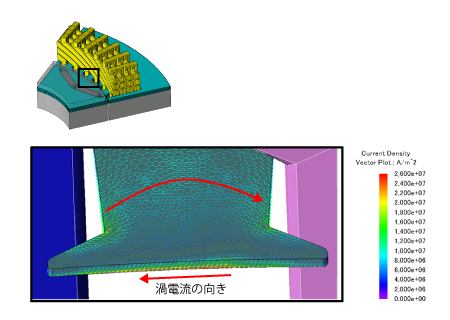
■ ティース先端の渦電流分布
このことから、ティース先端には斜め向きの磁束が入射し、渦電流も斜めに傾いて流れていると考えられます。
渦電流を面内と積層方向に分解して評価することができず、鋼鈑を1枚ずつ詳細に見ていく必要があります。
モータ設計に求められる要件は高度化しており、トルクリップルや逆起電圧、線間電圧制限、磁石の減磁耐性、コアにかかる応力の制約を満たしつつ、低速時や高速時のトルクを最大化させることが求められます。このような厳しい要求を満たす設計探査を人の手で行うことは至難の業です。
JMAGでは遺伝的アルゴリズム(GA)を用いた最適化計算を用い、設計案の多様性を保ちつつ、改善案候補群を追い込むことができます。実用的な例題を通して、多目的・多制約最適化問題に対する大域的設計探査の自動化を試み、多段階FEA、等価回路モデル、実験計画法による絞り込みを行い、その数値実験結果を示しています。
また、近年注目度が増している、レイアウトを大胆に変更できるトポロジー最適化を用いてモータを設計した事例を示しています。結果として、各トポロジーがモータ特性に与える影響を明らかにしています。
■ 多目的パラメータ最適化結果
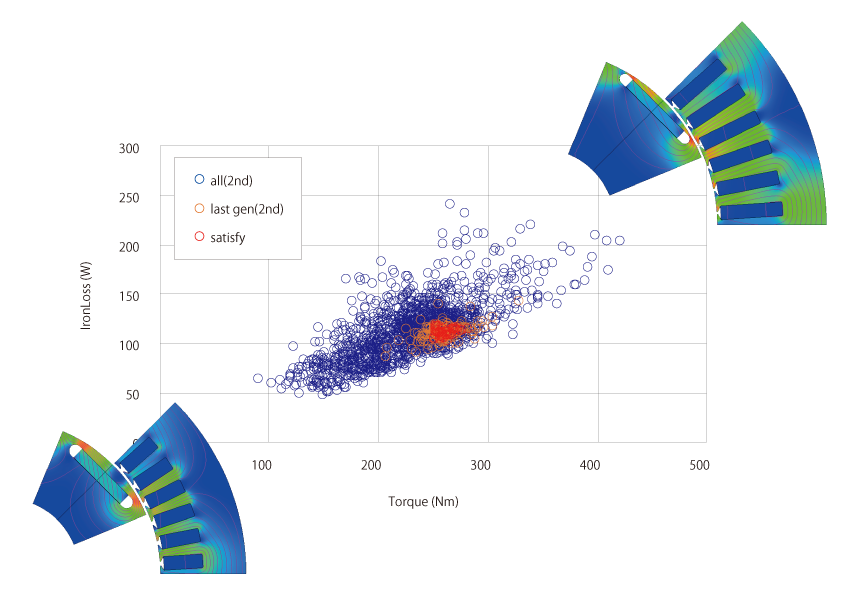
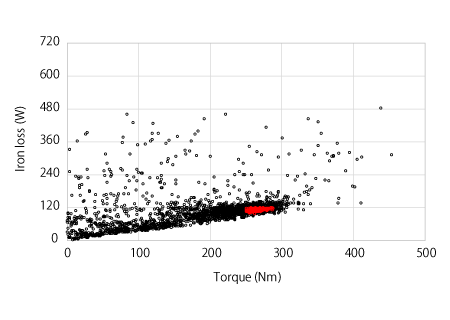
■ 多目的・多制約最適化問題の大域的設計探査と実行可能解
掲載の図は縦軸に低速時鉄損、横軸に低速時トルクをとり、最適化計算の結果を表しています。赤色で示した点が、全ての制約条件を満たす実行可能領域を示します。多目的・多制約最適化問題の場合、実行可能領域が非常に狭く複雑な領域になっていることが分かります。
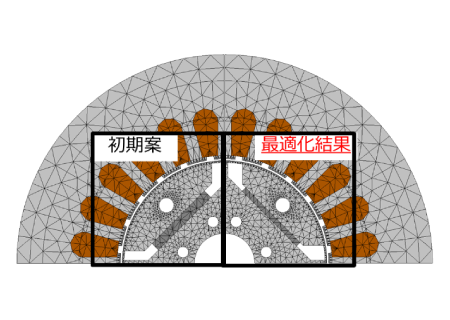
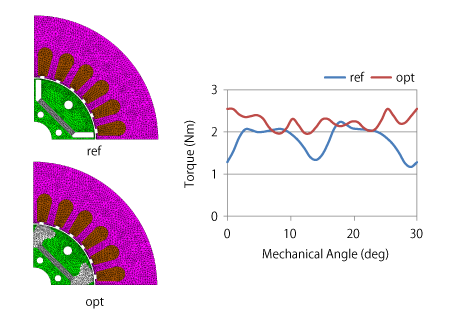
■ IPMモデルのロータトポロジー最適化
refは既存のモデル、optは最良ケースであり、平均トルク、トルクリプルともに改善しています。フラックスバリアがギャップ付近まで広がることで磁石磁束がステータ側に流れやすくなり、平均トルクを増加させていると考えられます。また、フラックスバリアがギャップ付近で周方向に広がることで磁気抵抗の変化を緩やかにし、トルクリップルが減少したと考えられます。
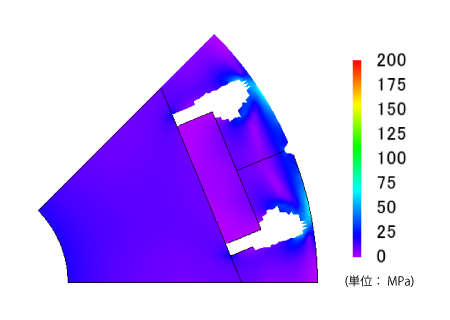
■ 応力および変位制約を考慮したIPMモータのトポロジー最適化
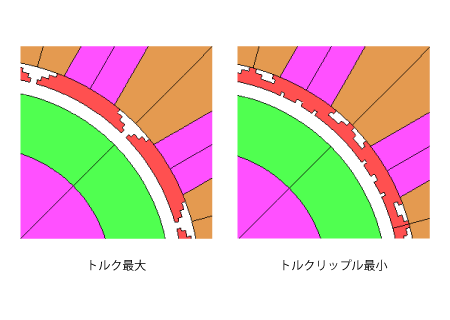
■ ティース形状のトポロジー最適化
最適化結果として得られた最良ケースとして、トルクの平均値が最大の形状とトルクリップル率が最小である形状を示しています。トルクが最大となる最良ケースでは、スロット開口部がありますが、トルクリップルが最小となる最良ケースでは、ティースは全周にわたりつながっておりスロット開口部はありません。このことから、スロット開口部の有無が平均トルクおよびトルクリップルに対してトレードオフの影響を与えることが分かります。
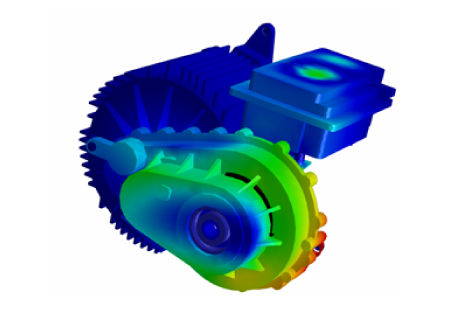
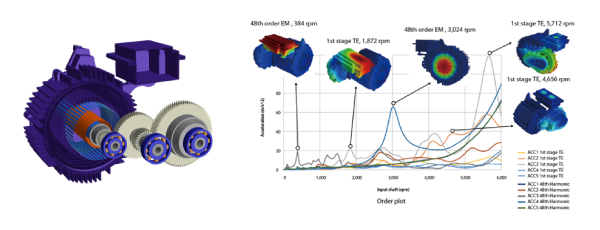
モータなどコンポーネント単体では、従来より振動に対するシミュレーションを用いた評価および対策が数多く行われてきました。一方で、モータ単体で振動を抑えられたとしても、ギアボックスやインバータを含むドライブラインや車両全体での振動が問題となり、モータの設計に手戻りが発生する場合があります。製品設計全体のフローを円滑に進めるには、あらかじめモータ単体だけでなく、ドライブラインや車両全体も視野に入れた評価、対策が重要です。
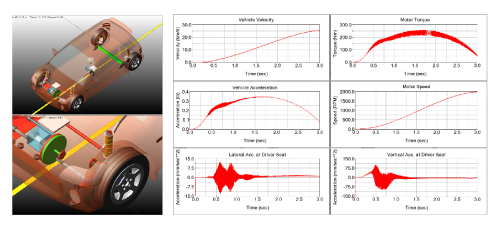
本資料の中では、JMAGと振動解析ソフトウェアのRomax Nexusを連携させ、モータの電磁加振力がギアボックスの振動を引き起こすことを突き止めています。JMAGと汎用機構解析ソフトウェアAdamsを連携し、車両走行時の振動を評価しています。結果として、車両始動時にモータの空間高調波に起因する振動が発生することが分かりました。また、モータ等価回路モデルを用いることで、回路シミュレーション実施時に駆動状態に応じた物理量をモニタリングできます。これにより、例えば制御側での工夫による振動低減の検討が可能となります。
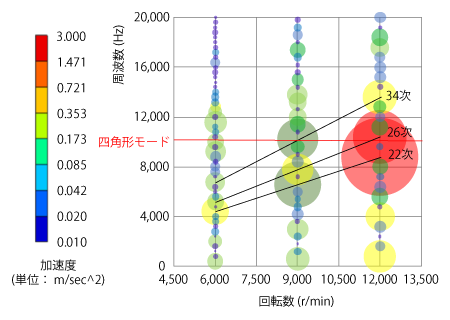
■ 電磁力の次数と極数に依存した固有モード
回転数ごとに見ると、電磁力の22次、26次、34次の周波数で振動が大きくなっていることが分かります(各回転数と破線の交点)。
このモータは10(kHz)付近に四角形の固有モードが存在しており、電磁力の特定の周波数成分と特定の固有モードが強く共振していることを表しています。
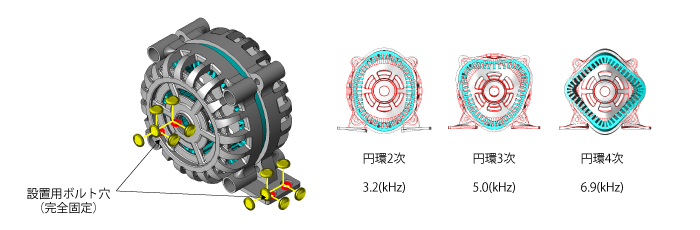
■ オルタネータの拘束条件と固有モード
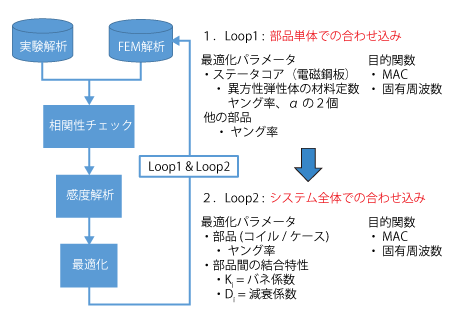
■ モータを例とした相関解析の概念図
相関解析は部品単体での合わせ込みであるLoop1と、アセンブリした状態での合わせ込みであるLoop2の二段階で行われます。
■ ギアとモータからの励振を考慮したドライブラインのNVH評価
この例では、電磁加振力の48次成分がギアボックスの振動を引き起こすことを突き止めています。
[L-MU-91] JMAG/Romax Nexus連携によるEV ドライブラインのNVH 解析
■ 車両加速時の振動評価
この例では、3秒かけて停止状態から時速30km/h程度まで加速させています。最下部の左右のグラフは運転席の振動を示しており、特に始動時から1.5秒までの間で大きな振動が発生していることが分かります。
[L-MU-93] JMAG/Adams/Simulink連携による車両走行シミュレーション
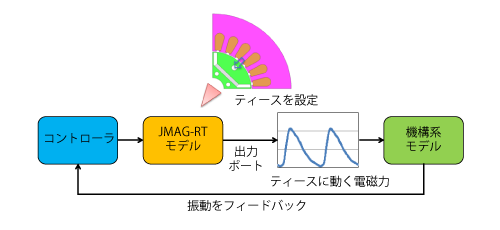
■ 振動をフィードバックさせた制御アルゴリズム
利用例として、IPMモータの振動を低減させるためのブロック線図を示しています。
JMAG-RTモデルの出力ポートからティースに働く電磁力を出力し、機構系モデルで振動を計算します。得られた振動をコントローラにフィードバックし、振動を抑えるような指令値を生成します。
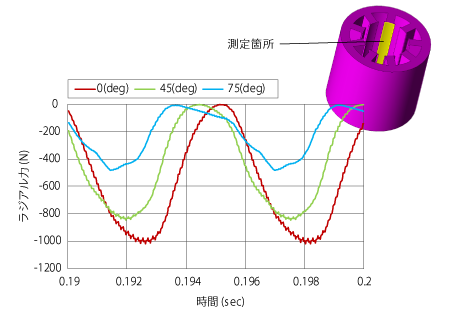
■ 電流位相とティースに働くラジアル力
この例では電流振幅を固定としているため、電流位相の違いだけでティースに働くラジアル力が変化しています。電流位相を進めるとロータ磁石の磁界が弱められるため主磁束が減少し、ラジアル力も小さくなります。
熱はモータ性能に大きく影響します。磁石を有するモータであれば熱減磁によりトルクの低下を引き起こしますし、誘導機の二次導体やステータコイルは電気抵抗が増加します。また、コイル素線の絶縁被膜の耐熱温度を超えることはできません。モータ設計は磁気設計と熱設計の両立が不可欠です。
磁気回路と部品温度の同時評価により、設計開発の手戻りを削減します。設計案が多数ある場合は、熱等価回路を用いることで迅速に部品温度を考慮したモータ性能を評価することができます。また、油冷や空冷など冷却機構を検討する場合は、熱流体の影響を考慮することが有効です。JMAGで求めた正確な損失と専門の熱流体解析ソフトウェアを連携することで、より高精度な温度推定が可能となります。
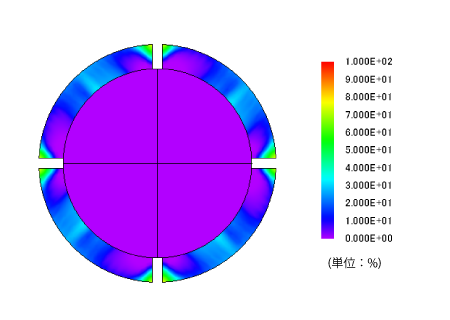
■ ロータ磁石の減磁率分布
減磁率とは、どの程度減磁が進行したか示すものです。
減磁率分布より、特に磁石の角部で減磁が進行していることが分かります。
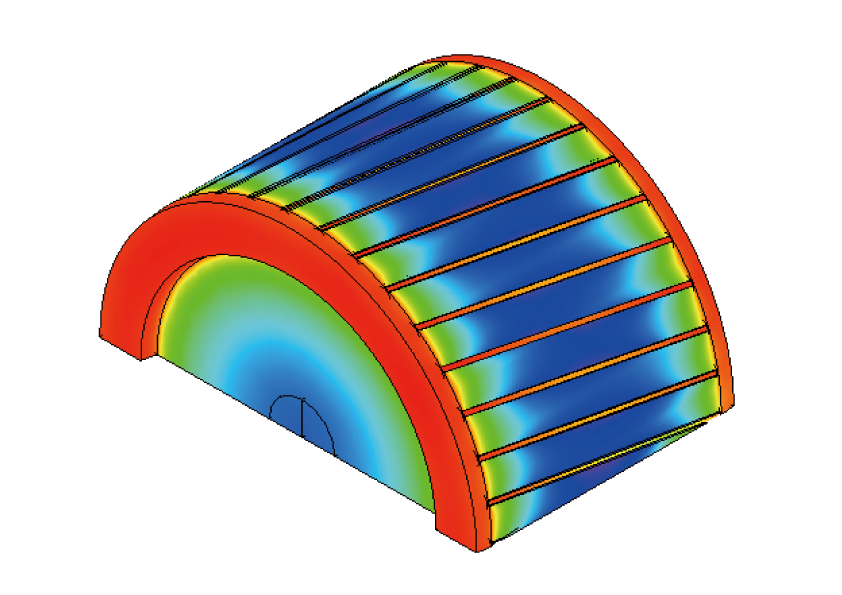
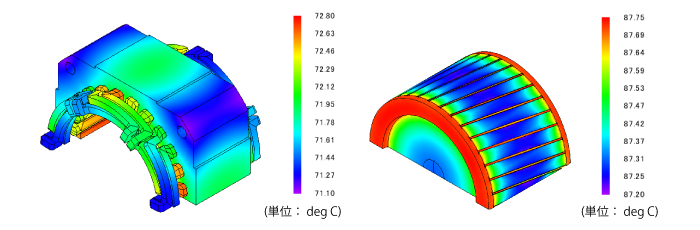
■ 誘導電動機の温度分布
コイル、二次導体、コアに生じた損失を熱源としたときの、定常時温度分布を評価しています。
ロータは二次導体の渦電流が主な熱源となっており、ロータコアに熱が伝わっています。
また、ロータ側が高温になっていますが、これはステータに閉じ込められて熱を排出しにくいためです。
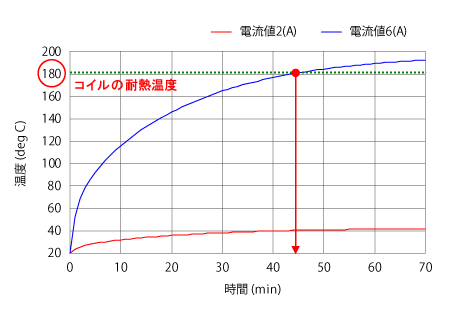
■ 電流値を変えたときのコイルの温度変化
電流値2(A)の場合は、70(min)連続運転してもコイルの温度が40(deg C)程度であることが分かります。
電流値を6(A)に増やすと、モータ駆動時間44(min)でコイルの温度が耐熱温度180(deg C)を超えてしまうことがわかります。
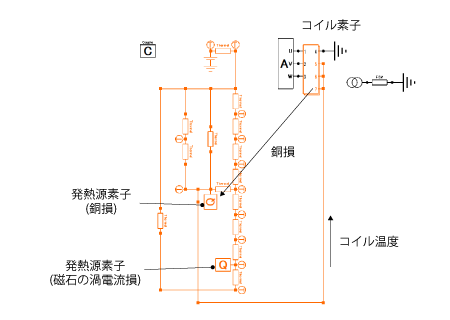
■ 熱等価回路を使用した磁気回路設計
熱等価回路で得られたコイル温度でコイルの電気抵抗を温度補正し、更新された銅損を使って温度計算を繰り返します。
最終的に温度平衡状態となり、室温時と昇温後のトルクの違いなどを確認することができます。
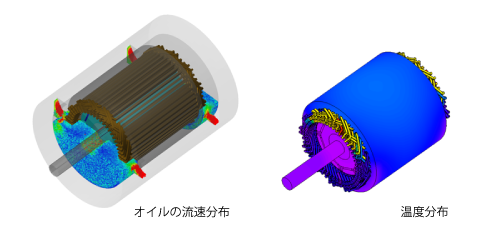
■ オイルの冷却効果を考慮したモータの温度評価
JMAGと熱流体解析ソフトウェアであるParticleworksを連成し、オイル冷却を考慮したモータ温度分布を評価しています。
流速分布より、流出入口だけでなく、回転するシャフトに接したオイルも流れが生じやすい箇所であることが分かります。
温度分布をみると、オイルに浸かっている箇所とその他の箇所で温度の違いがみられます。
[L-MU-92] JMAG/Particleworks連携によるモータの冷却解析
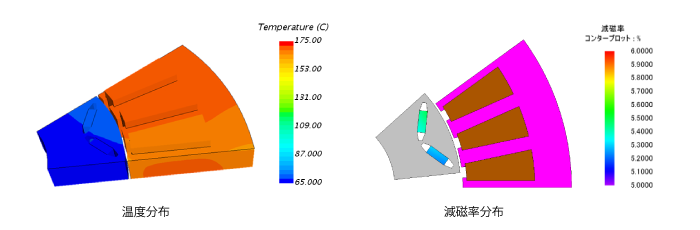
■ 水の冷却効果を考慮したIPMモータの熱減磁評価
JMAGと熱流体解析ソフトウェアであるSTAR-CCM+を連成し、モータの温度上昇と磁石の熱減磁を評価しています。
水による冷却を行っても、温度分布に示すように磁石の温度が70(deg C)に達しています。
また、温度上昇によりロータ磁石で5%弱の減磁が生じることがわかりました。
[L-MU-07] 専用ツールとの連携によるマルチフィジックス解析
駆動用モータは各動作点で効率が最大になるように制御されます。制御設計・検証の一つとして各動作点での電流指令値を同定します。現状、最大効率制御の電流指令値は実機を用いて同定されています。これをモデルベースに置き換える場合、モータモデルには正確な応答性が求めれます。
FEAをベースとした等価回路モデルには空間高調波や磁気飽和などの情報が含まれ、モータ特性を忠実に再現することが可能です。また、損失モデリングの工夫、軸方向の漏れ磁束の考慮によってさらに高精度な等価回路モデルとなります。モータモデルの高精度化によって実機試作を待たずにパラメータ適合作業のフロントローディングが可能となり、開発期間を短縮することが可能です。
また、本資料では近年注目を集めている多相モータに関してインバータ故障を模擬し、システムの冗長性を評価した事例を示しています。
■ ベクトル制御時のトルク波形の比較
JMAG-RTモータモデルではスロット高調波成分も含めたトルク波形が得られていることがわかります。
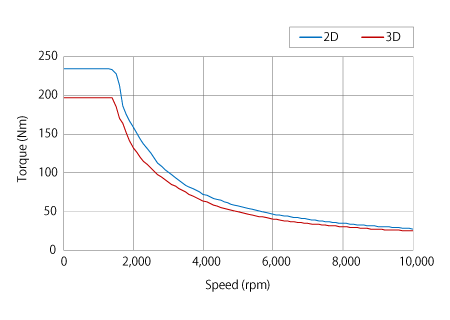
■ 3次元モデルの必要性
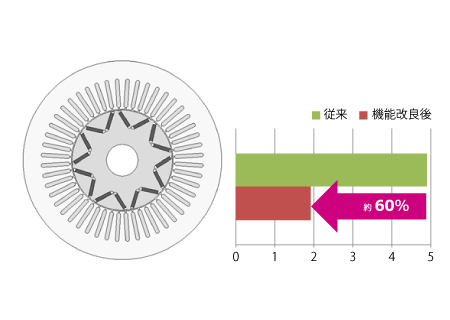
■ 高精度モータモデル(JMAG-RTモデル)生成時間の短縮
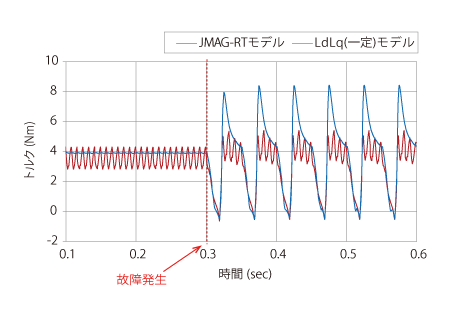
■ IPMモータの故障発生時のトルク変化
特に故障後について、両者のトルク波形に差異が生じています。JMAG-RTモデルは磁気飽和によるインダクタンスの変化を正確に考慮しており、このことがトルク波形の違いの要因です。
■ 6相同期モータ駆動システムのシミュレーション
各相間の磁気結合や磁気飽和、および空間高調波を考慮したJMAG-RTモデルを使用して、インバータ2つに接続された6相同期モータをシミュレーションすることができます。
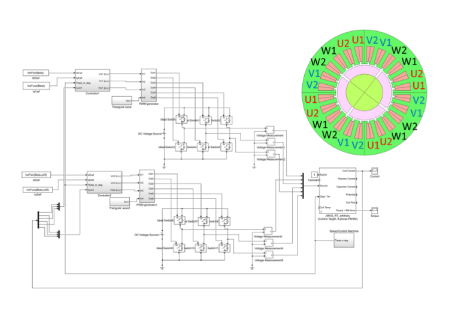
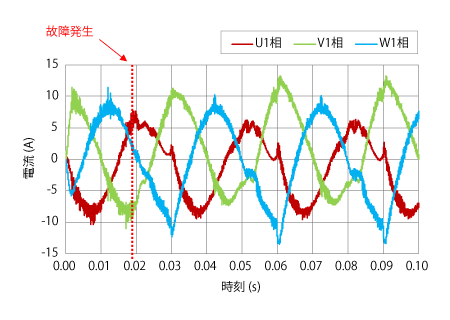
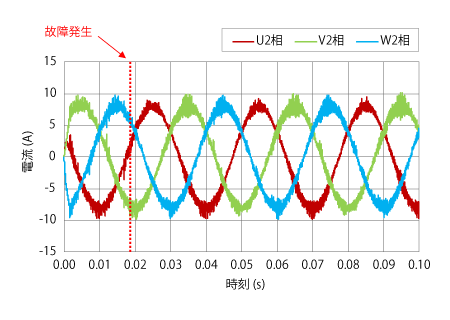
■ 6相SPMモータのインバータ故障シミュレーション
6相SPMのJMAG-RTモデルを制御/回路シミュレータへ取り込んで、インバータ故障時の回路シミュレーションを行っています。
インバータ故障時は過電流が流れ電磁鋼板の磁化特性の非線形領域を使用するため、インダクタンスも非線形的な挙動を示します。
故障発生後にU1相の電流が減少し、V1相、W1相のコイルに過電流が流れています。
一方で、U2相、V2相、W2相の電流は安定していることが分かります。
[JAC230] 6相SPMモータのインバータ故障シミュレーション
PMモータの性能は使用される永久磁石によって影響を受けます。モータ開発においても磁石の状態を可視化し工夫や対策を行うことで、より高いパフォーマンスを発揮するモータの設計に役立ちます。
駆動用モータは幅広い領域で動作します。低速域では大トルクが求められ、高速域では逆起電圧を抑えたいという要求があります。両者は相反しますが、永久磁石の磁束を可変とすることで要求を実現するメモリモータが開発されています。メモリモータは連続的に着磁・減磁を繰り返します。そのような磁化状態の動的な変化の評価もJMAGは可能です。
また、永久磁石の減磁耐性は磁石の温度によって変化するため、磁石温度と反磁界の大きさを同時に考慮した減磁評価が有用です。減磁の対策として、磁石表面からジスプロシウムを拡散させ磁石の保磁力を高めるDy拡散磁石の使用があげられます。JMAGはDy拡散磁石の熱減磁耐性も正確に扱うことができます。
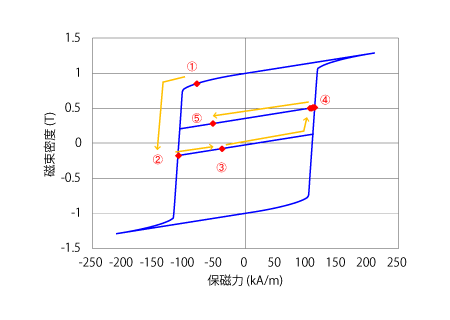
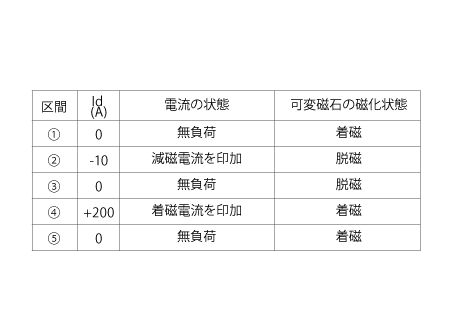
■ メモリモータで使用している可変磁石の動作点
メモリモータは永久磁石の磁化状態を可変とすることで、低速側、高速側それぞれに適したモータ性能を発揮することができます。本事例では、可変磁石の磁化状態を変化させ、メモリモータの特性の変化を確認しています。
掲載の図は、可変磁石が完全着磁されている状態から、一度減磁を行い、その後再度着磁したときの可変磁石の動作点を示しています。入力された磁化特性上を移動しながら、着減磁電流が与えられた際に残留磁束密度が変化している様子が確認できます。
[JAC225] 可変磁石を用いたメモリモータの誘起電圧解析
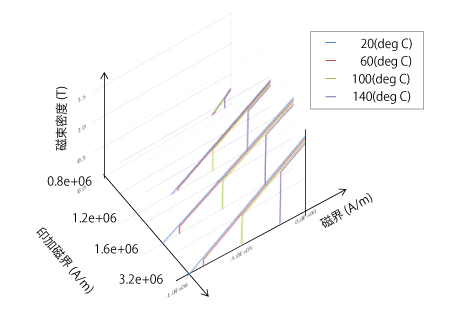
■ 熱減磁情報を持つ着磁材料
掲載の図は、着磁時の印加磁界-温度-減磁特性を示しています。この材料特性と着磁時に印可された着磁磁場によって、着磁後の磁石の磁化特性が定義されます。
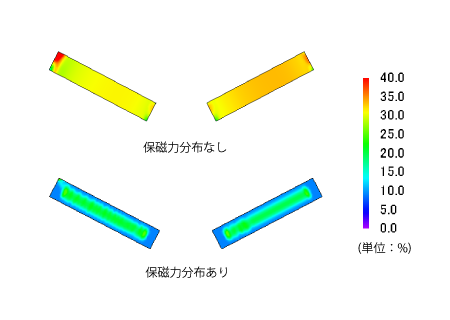
■ 保磁力分布の有無による減磁率の比較
磁石外面に高い保磁力を分布させることで、保磁力分布なしの磁石と比較して減磁率を低く抑えられていることが確認できます。
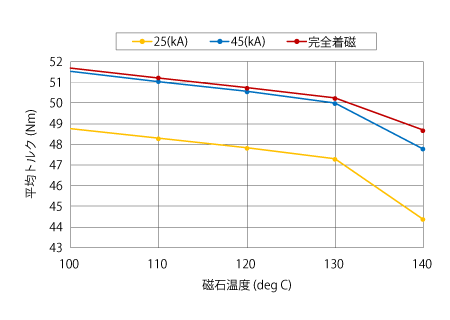
■ Dy拡散磁石を不完全着磁させたときの熱減磁耐性
着磁電流25(kA)では着磁が不完全であり磁石全体が十分に磁化されていないため、完全着磁に対し全温度範囲でトルクが低下しています。また、着磁電流45(kA)では磁石温度が130(deg C)を超えるとトルクの減少が大きくなっています。これは、不完全着磁によって局所的に減磁が大きい部分が生じているためであると推察されます。
電気自動車向けの駆動用モータとして、PMモータに加えて誘導電動機も注目を集めています。ここでは、JMAGを使った誘導電動機の評価機能、解析事例およびキーとなるテクノロジーをご紹介します。
誘導電動機のモータ性能を評価する手段として、効率マップがあります。JMAGでは簡単かつ高速に誘導電動機の効率マップを描くことができます。実駆動時の損失を評価する場合、PWMパルスを生成するインバータドライブによる影響を取り込みます。
誘導電動機の二次導体は温度によって電気特性が変化し、モータ性能に大きく影響します。本資料ではスキューを有する三次元の誘導電動機を対象に、発熱源となる損失を高速に求めて部品温度を評価した事例を紹介します。
また、駆動時の電磁加振力を周波数分析し、電磁共振による振動状態を評価した事例を紹介しています。
モータドライブ開発では、モータ等価回路モデルを用いて回路シミュレーションを行います。JMAGは機器定数の算出方法を工夫し、モータ等価回路モデルにFEAと同等の精度を持たせています。
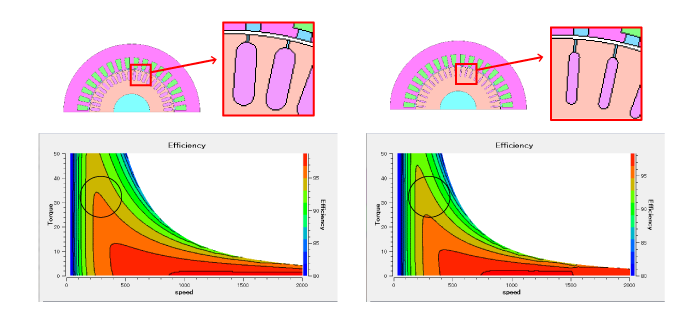
■ 二次導体のバー形状の違いによる効率マップ比較
JMAGでは誘導機の効率マップを高速に描画できるため、多数の設計案を容易に評価できます。
ここでは、バーの断面形状以外は保持した2つの設計案について効率マップを比較しています。
左のバーのサイズが大きい誘導機の方が、高効率領域が広いことが分かります(図中の黒○箇所)。
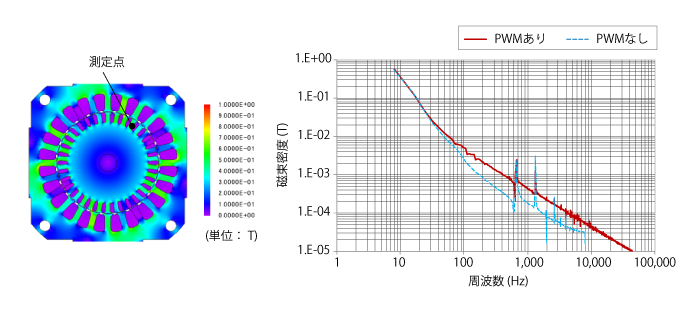
■ ロータティースの磁束密度の比較
誘導電動機は一般的にPWMパルスを生成するインバータドライブを使用しています。電流波形にも高調波成分が含まれ、鉄損が増加します。
掲載の図は、ロータティースの磁束密度をフーリエ変換したときの周波数成分を示しています。 PWMを考慮した場合と考慮しない場合で比較しています。
PWMを考慮したほうが高調波成分が増加しており、損失が増加することを示唆しています。
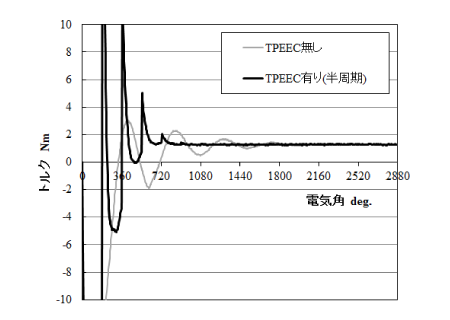
■ 時間周期補正の有無によるトルク履歴の比較
ここでは、時間周期補正(TP-EEC)の効果を、すべり0.1で駆動させた誘導電動機のトルク波形で確認しています。TP-EEC法を用いることで、早期定常化が達成できていることが分かります。
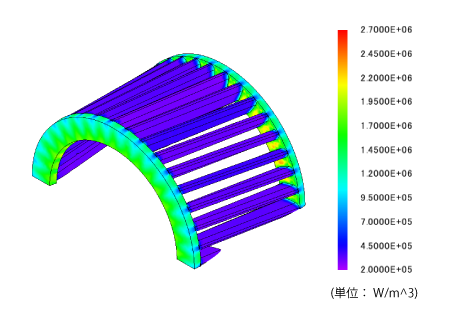
■ 二次導体のジュール損失密度と温度分布
ここでは、すべり0.1で誘導電動機を駆動させた時の、二次導体に生じるジュール損失密度分布を確認しています。特にエンドリングの損失密度が高く、他の部分に比べて温度が高くなる可能性を示唆しています。
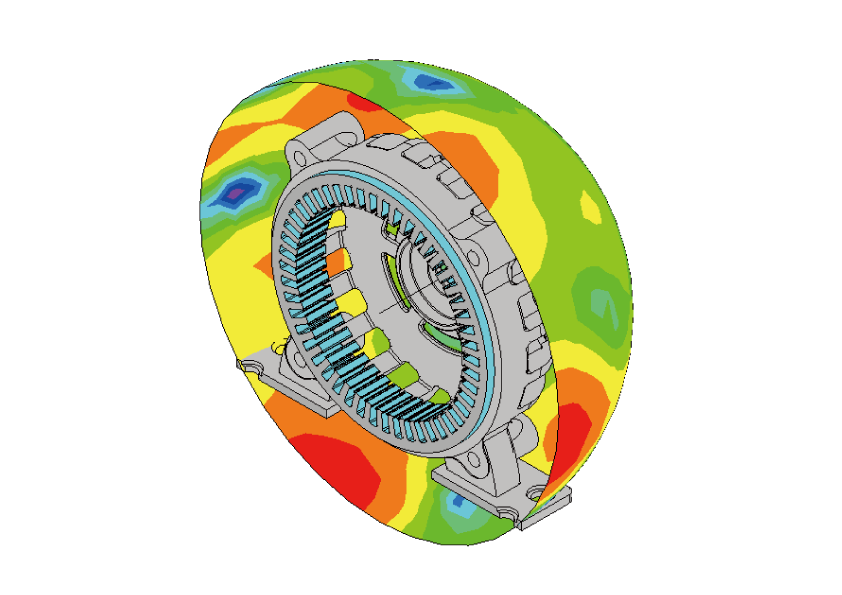
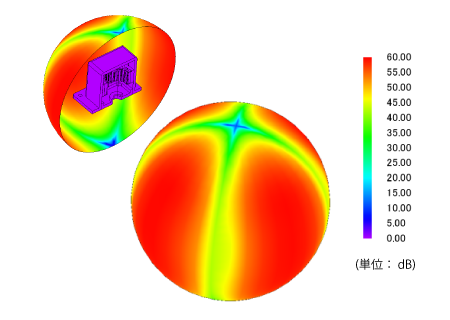
■ 誘導電動機から発せられる放射音分布
音圧レベルは4方向に対して高い分布を持ち、その最大値は60dBに達していることが分かります。このことから、電磁力および固有モードが空間4次の成分を持ち、電磁共振現象が発生している可能性があります。
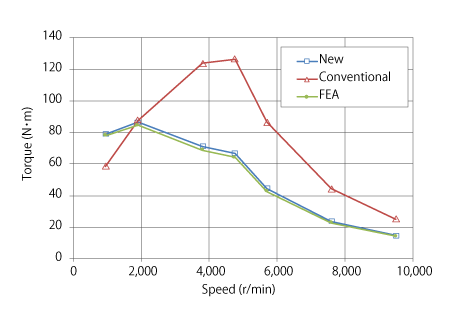
■ モータ等価回路モデルの高精度化とNT特性の比較
改良前のモータ等価回路モデル(図中のConventional)はFEAの結果と大きく乖離していますが、改良されたモータ等価回路モデル(図中のNew)はFEAのNT特性を再現できていることが分かります。
PMSM、誘導電動機に加え、様々なタイプのモータが注目されています。JMAGは汎用磁界解析ソフトウェアであり、任意のモータタイプに対する設計ツールとしてご利用いただけます。本資料では、様々なモータの特性解析事例をご紹介します。
アキシャルギャップモータはNTなどの基本特性、コギングトルクを求めています。また、ギャップ付近の漏れ磁束と交流損失の関係を明らかにしています。
シンクロナスリラクタンスモータはモータ等価回路モデルを用いた回路制御シミュレーション、効率マップの作成事例をご紹介します。
巻線界磁型同期モータに関しては、2次元モデルと3次元モデルの違いを明らかにし、同期インピーダンスへの影響を示しています。
リニアモータに関しては、机上計算では困難な直線運動部と曲線運動部でのギャップ磁束密度の違いを正確にとらえ、推力に与える影響を評価しています。
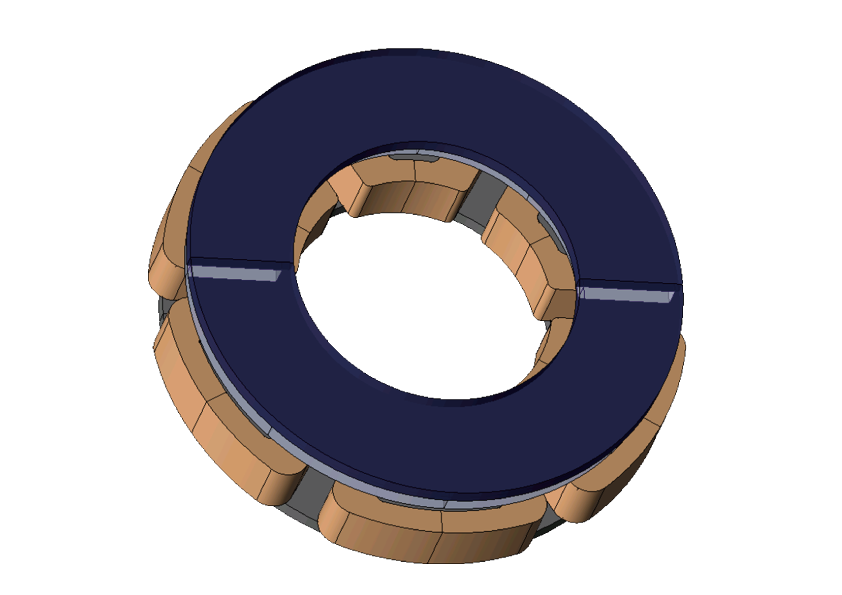
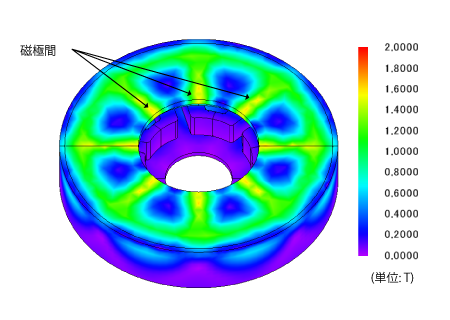
■ アキシャルギャップ型モータの磁気回路
掲載の図は、逆起電圧が小さく大電流が流れる低速時の磁束密度分布を示しています。
磁極間付近で磁束密度が高くなっていることがわかります。磁束密度が高くなると磁気飽和が起こり漏れ磁束が生じるため、トルクの低下が懸念されます。
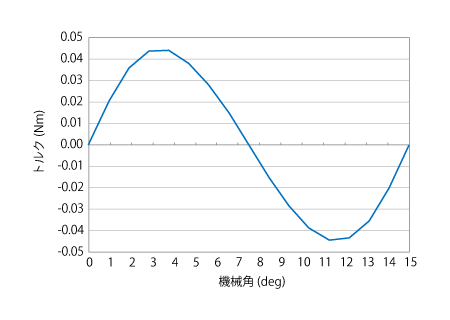
■ アキシャルギャップ型モータのコギングトルク波形
このモータのコギングトルクは、振幅がおよそ0.044(Nm)であることがわかります。また、コギングトルクの周期は機械角1周の360degを極数の6とスロット数の8の最小公倍数である24で割った値、すなわち15(deg)になります。
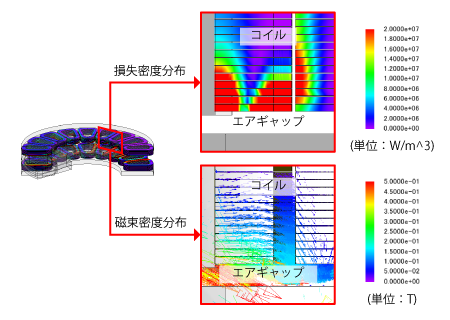
■ アキシャルギャップ型モータの交流銅損の分析
掲載の図は、コイル断面の損失密度分布と磁束密度分布を示しています。
損失密度分布を見ると、エアギャップ付近で損失が大きくなっていることがわかります。
磁束密度分布より、エアギャップ付近の漏れ磁束がコイルに鎖交することによって損失の分布が発生していると考えられます。
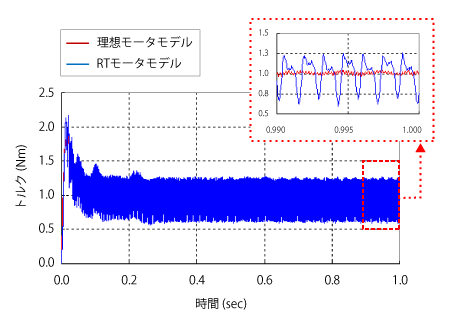
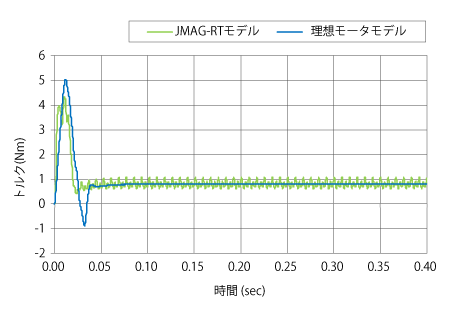
■ シンクロナスリラクタンスモータの速度制御時のトルク波形
ここでは、高精度モータモデル(JMAG-RTモデル)と、一定値のモータ定数を持たせた理想モータモデルのトルク波形を比較しています。
定常状態のトルク波形を見ると、JMAG-RTモデルでは空間高調波によるトルクリップルを表現できていることがわかります。
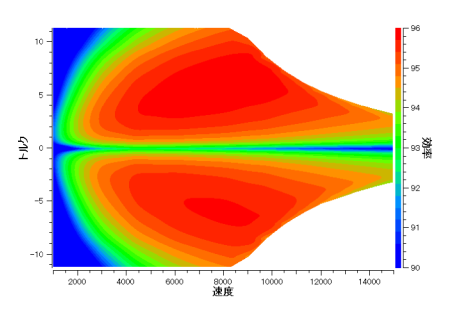
■ シンクロナスリラクタンスモータの効率マップ
このモータは、回生側に比べて力行側の方が、高効率領域が高回転側に広がっていることが分かります。
また、8,000r/minまで高トルクを維持できています。これは、磁石がないために逆起電圧が低いためです。
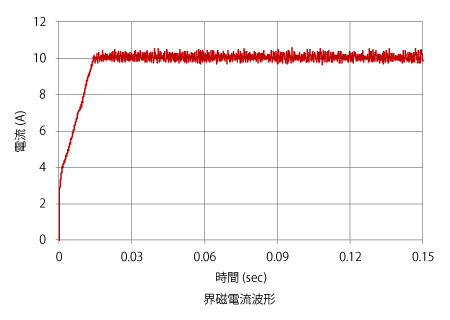
■ 巻線界磁型同期モータ始動時の電流波形
巻線界磁型同期モータの駆動では、界磁側と電気子側がそれぞれ独立に制御されます。ここでは、磁気飽和や空間高調波を考慮できる高精度モータモデル(JMAG-RTモデル)を用いた回路シミュレーションを行っています。
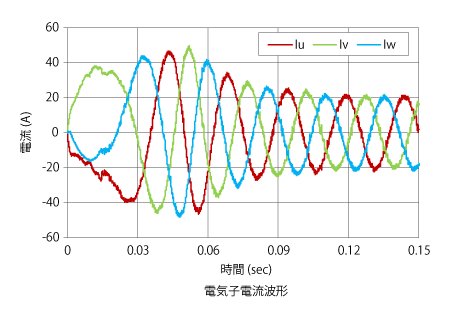
ベクトル制御を行った時の界磁電流波形、電機子電流波形を掲載しています。
界磁電流は順調に指令値である10Aに到達し、到達後はスイッチングによる高調波が含まれていることが分かります。電気子電流は途中で最大40Aに到達し、次第に振幅20Aに落ち着く様子が確認できます。
[JAC213] 巻線界磁型同期モータの回路制御シミュレーション
■ 無負荷条件下での磁束密度分布と磁束線(界磁電流120A時)
掲載の図は、3次元モデルの解析結果より、端部付近の磁束密度分布と磁束線分布を確認しています。
磁束線分布からも軸方向への漏れが生じていることが分かります。この磁束の漏れにより電機子側へ鎖交する磁束が減少し、これを打ち消すのに必要な電機子側の短絡電流も減少します。
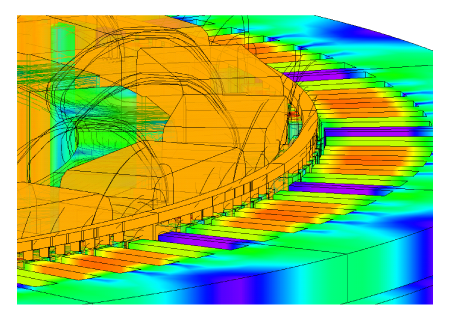
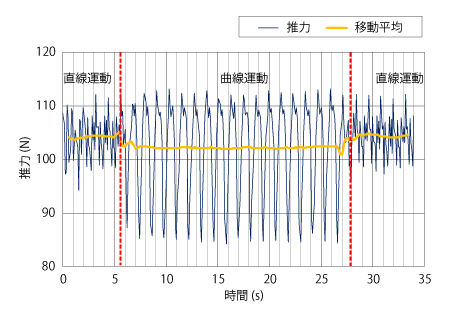
■ 曲線部を有するリニアアクチュエータの推力変動
ここでは、リニアアクチュエータを駆動させ、直線運動から曲線運動に遷移したときの推力を評価しています。
曲線部では直線部と比較して推力が低下することがわかります。これは、曲線部で可動子と固定子の対向面積が縮小し、有効磁束が減少するためです。
また、曲線部で推力変動量が大きくなっていることがわかります。曲線部では磁石の界磁が非正弦波状になるのに対してコイルの起磁力は正弦波であるため、本来意図しない推力が発生しています。
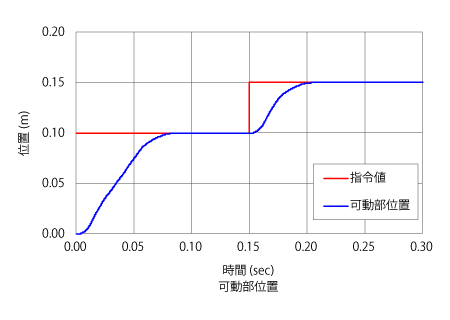
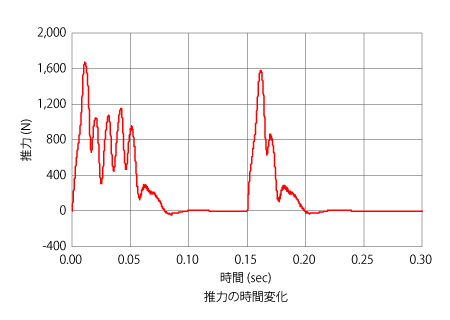
■ リニアモータの位置決め制御時の挙動
リニアモータは高い位置決め精度を実現できるため、搬送装置や工作機械などに使われています。
ここでは、永久磁石型リニアモータの位置を目標値に制御を行い、応答性及び推力の変動を評価しています。
可動部位置の時間変化より、高速に可動部が指令値に達していることが確認できます。
推力の時間変化を見ると、可動部とスロットの位置関係で推力が変動していることが分かります。
[JAC041] 制御シミュレータとJMAG-RTを用いた永久磁石型リニアモータの位置決め制御解析
導入相談・お問い合わせ
これから電磁界解析導入を検討される方、JMAGを導入検討されるにあたりご不明な点がございましたら何なりとお知らせください。
こちらのフォームから導入相談後、ライセンス契約された方には以下書籍をプレゼントいたします。
- 「モータ設計初心者のための 永久磁石同期モータ設計入門」(9月発行予定新刊)
